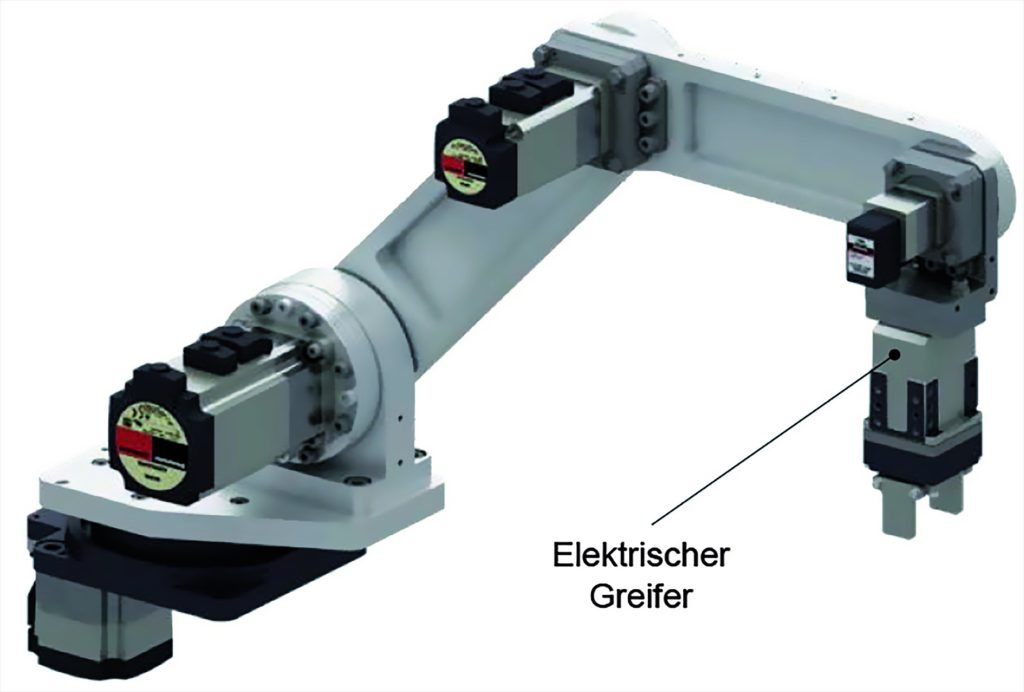
Pneumatische Greifer sind zwar leicht, kostengünstig und einfach zu bedienen, aber eine präzise Einstellung von Greifkraft und Geschwindigkeit ist schwierig. Elektrische Greifer sind hier klar im Vorteil. Denn sie ermöglichen es dem Anwender, Greifkraft, Geschwindigkeit und Position genau auf das Werkstück abzustimmen. Das verhindert nicht nur abruptes Anstoßen an das Werkstück, sondern Greifkraft und Taktzeit werden ebenso angepasst. Mit Hilfe der Motorposition kann festgestellt werden, ob ein Werkstück vorhanden ist. Zusätzlich können bei Vorhandensein die Abmessungen desselben überprüft werden. Beim elektrischen Greifer der EH-Serie setzt Oriental Motor den AZ-Motor als Antrieb ein und kombiniert ihn mit einer Greifer- und Zahnstangenmechanik .
Einfacher Aufbau
Auch wenn pneumatische Greifer bei Pick&Place-Anwendungen häufig im Einsatz sind, stoßen sie beim sanften Greifen von Werkstücken mit geringer Steifigkeit an ihre Grenzen. Bei der EH-Serie ist keine zusätzliche Sensorik bei der Endpunktbestimmung des Greifvorgangs oder bei der Werkstückbemessung notwendig. Diese Vorgänge sind vollständig automatisiert. Außerdem ist der EH-Greifer durch die Gleichstromversorgung gut für den Einsatz in batteriebetriebenen Geräten, wie fahrerlosen Transportfahrzeugen oder mobilen Robotern, geeignet.
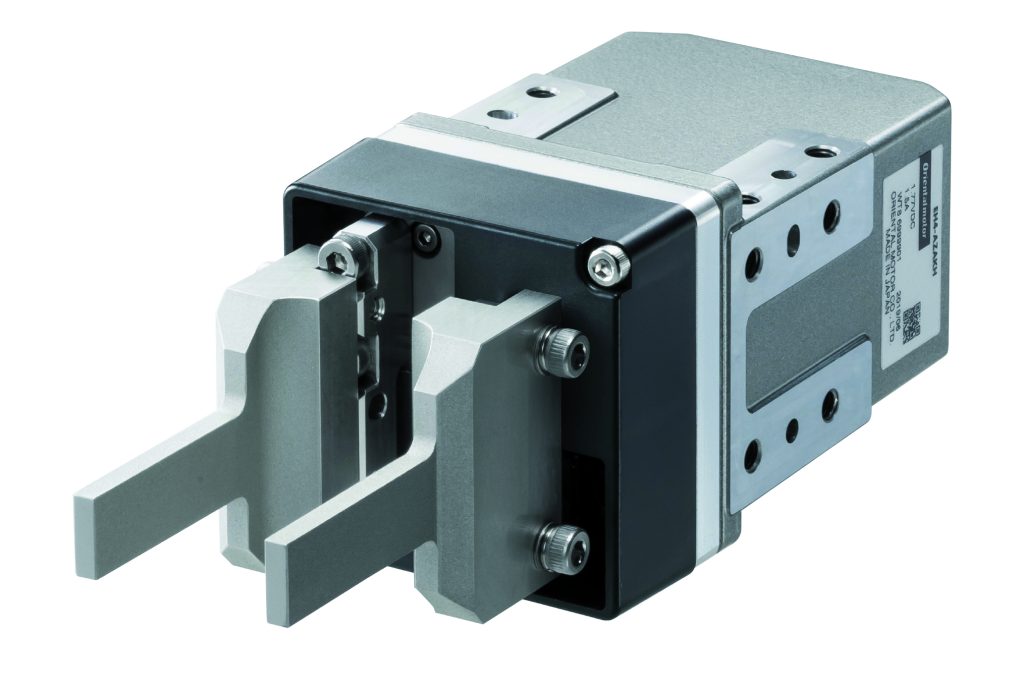
Die Kombination aus Zahnstangenmechanik und 28mm-Motor hält die Abmessungen des Greifers klein. Der Hub beträgt 25mm, sodass auch Werkstücke mit unterschiedlichem Format bis zu dieser Distanz gegriffen werden können, ohne die Finger austauschen zu müssen. Durch seine Schmierung konnte der Greifer in Tests 20 Millionen Zyklen mit voller Kraft problemlos ausführen.
Motor mit Multiturn-Absolutsensor
Der Motor besitzt einen Multiturn-Absolutsensor, der im Falle eines Stromausfalls die Positionsinformationen mechanisch beibehält und es der Maschine ermöglicht, den Betrieb ohne Referenzfahrt fortzusetzen.
Stabile und fein justierbare Greifkraft
Bei pneumatischen Greifern erfolgt die Regulierung der Greifkraft mit Hilfe eines Manometers über ein Druckminderventil. Eine Feinjustierung ist dabei kompliziert und aufwändig. Der Luftdruckverlust hängt von der Länge und dem Innendurchmesser der Leitung vom Kompressor zum Regler sowie von der Umgebungstemperatur ab und muss bei einer Änderung dieser Bedingungen nachjustiert werden. Die elektrisch angetriebene Lösung von Oriental Motor kommt nicht nur ohne Druckluftinfrastruktur aus, auch die Druckregulierung ist einfacher: Die EH-Serie übt kontinuierlichen Druck auf das Werkstück aus und der Motorstrom kann bezogen auf den Maximalwert in Einprozentschritten eingestellt werden. Der verlustarme Zahnstangenmechanismus des Systems gewährleistet eine stabile Greifkraft unabhängig von der Umgebungstemperatur. Außerdem hat die Länge des Anschlusskabels auf Grund des Konstantstromantriebs des Treibers keine negative Auswirkung auf die Greifkraft.
Weitere Vorteile
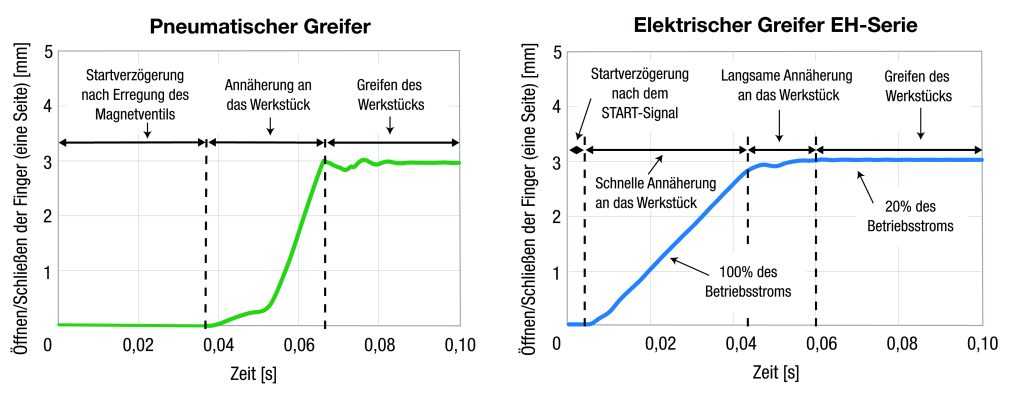
Pneumatische Greifer regulieren das Öffnen und Schließen der Finger mittels Änderung der Luftmenge. Die Luft reagiert auf Druck- und Temperaturschwankungen mit Ausdehnung bzw. Kontraktion. Das kann sich nachteilig auf die Geschwindigkeitsstabilität und -steuerung auswirken. Im Gegensatz dazu bietet der EH-Greifer durch seinen Motorantrieb hohe Zuverlässigkeit: Geschwindigkeit, Beschleunigung und Verfahrweg der Finger können präzise eingestellt und die Taktzeit berechnet werden. Bei pneumatischen Greifern werden Greifkraft und Geschwindigkeit durch die Variation des Luftdrucks und des Luftdurchsatzes eingestellt, die sich gegenseitig beeinflussen und nur schwer unabhängig voneinander eingestellt werden können. Außerdem ist es nicht einfach, die Durchflussmenge und die Geschwindigkeit während des Betriebes zu ändern. Wenn der Luftstrom vom Regler zum Greifer durch Öffnen und Schließen des Magnetventils umgeschaltet wird, gibt es eine Verzögerung von 10ms oder mehr, von der Erregung des Magnetventils bis zum Start der Fingerbewegung. Das bedeutet, dass sich die Finger schneller öffnen und schließen, aber mehr Zeit benötigen, um den Greifvorgang zu vollenden.
Betrieb mit gemischten Parametern
Da mit der EH-Serie Greifkraft, Geschwindigkeit und Position separat gesteuert werden können, ist ein Betrieb mit einer Kombination dieser Parameter leicht umsetzbar. So können die Finger im Positionierbetrieb bis zu einer definierten Position mit höherer Geschwindigkeit verfahren, im Druckbetrieb nähern sie sich dann dem Werkstück mit langsamer Geschwindigkeit. So kann die Taktzeit deutlich erhöht werden. Hinzu kommt noch, dass bei einem elektrischen Greifer die Zeit zwischen Startsignal und Einsetzen der Bewegung kürzer ist als bei einem pneumatischen Greifer. Das langsame Greifen des Werkstücks ist insbesondere in Anwendungen von Vorteil, bei denen fragile oder weiche Werkstücke gegriffen und bewegt werden müssen.
Durch den integrierten Absolutsensor sind keine externen Schalter für Start und Ende der Bewegung notwendig. Das Ende der Greifbewegung erfolgt über das TLC-Ausgangssignal, die Prüfung auf Vorhandensein eines Werkstücks über das AREA-Ausgangssignal.
Spezialanwendung Werkstückbemessung
Der EH-Greifer ist in der Lage Werkstücke auch zu bemessen. Dafür wird zunächst ein Greifvorgang ohne Werkstück ausgeführt und mit Hilfe der Signale CLR und P-Preset die Grundstellung eingestellt. Dann wird das Werkstück gegriffen und die Größe basierend auf der vom Treiber detektierten Position berechnet.
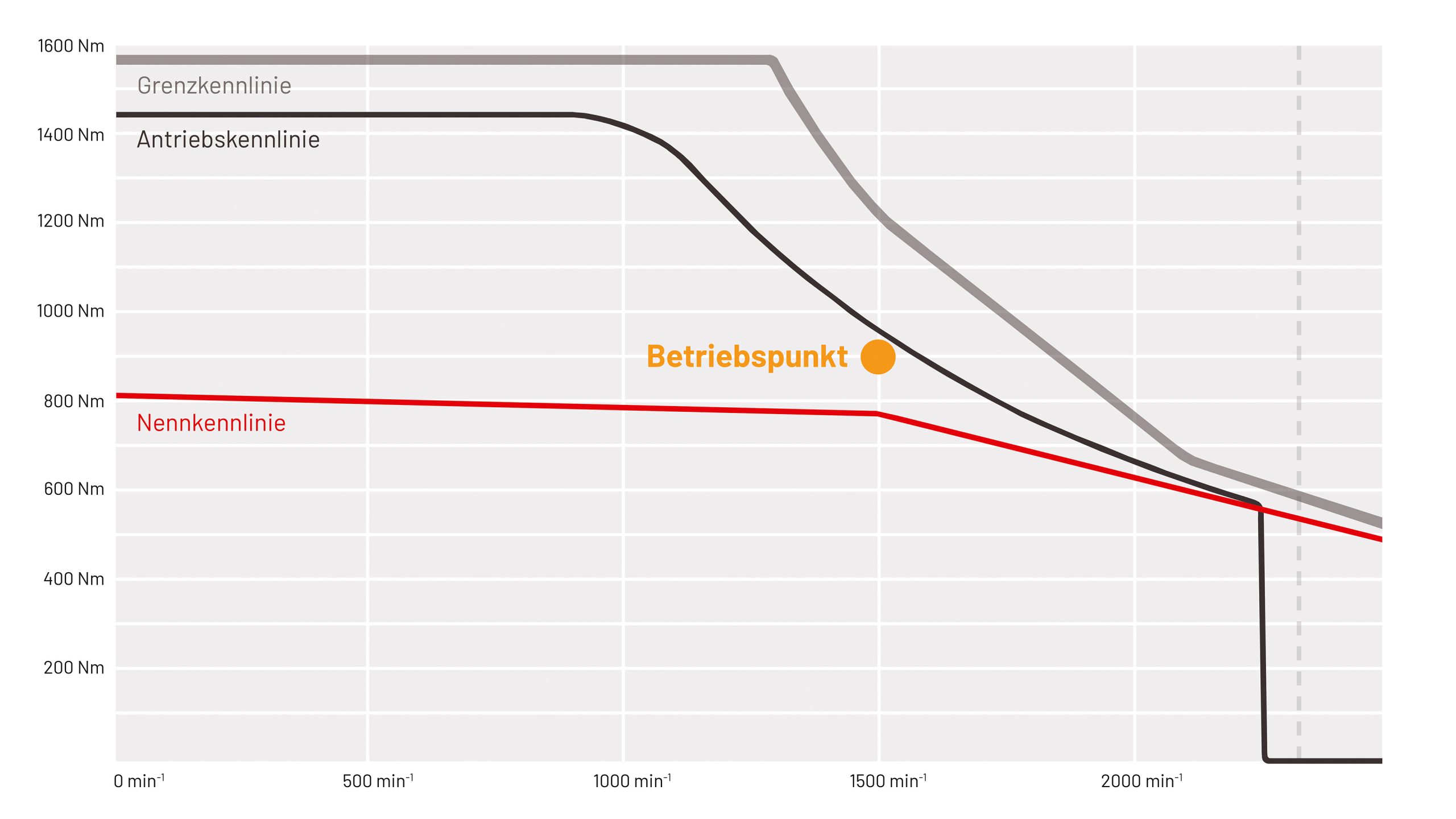
Für besonders zerbrechliche Werkstücke gibt es alternativ die Möglichkeit, einen Positionierbetrieb einzusetzen. Die Winkel/Drehmoment-Charakteristik des dabei eingesetzten Schrittmotors empfiehlt sich bei kleinen Werkstücken. Bei der Schließbewegung der Greiferfinger kann das Drehmoment eingesetzt werden. Die Finger greifen das Werkstück mit einer minimal kürzeren Distanz als die der Werkstückabmessung, wodurch die Greifkraft erzeugt wird. Dieser Vorgang wird mit Hilfe des Betriebsstromwertes gesteuert. Diese Methode eignet sich für Greifkräfte von weniger als 6N, da in diesem Bereich ein Druckbetrieb schwierig ist.