Bereits seit dem Jahr 2015 verstärkt die Bundesregierung im Rahmen ihrer Hightech-Strategie ihre Bemühungen, Deutschland auf dem Weg zum weltweiten Innovationsführer voranzubringen. Übergeordnetes Ziel war es, gute Ideen schnell in neue Produkte und Dienstleistungen zu überführen. Die Zusammenarbeit von Wissenschaft und Wirtschaft in der deutschen Produktionsforschung sollte die Voraussetzungen dafür schaffen. Im Rahmen des Förderprogramms ‚Innovationen für die Produktion, Dienstleistung und Arbeit von morgen‘ wurden Ideenwettbewerbe und Forschungsprogramme initiiert, damit Innovationen für die Produktion von morgen zum Nutzen der Gesellschaft weiterentwickelt werden können. Zielsetzung der Förderung war die Entwicklung, Gestaltung und Einführung neuartiger Systemlösungen zur Montage komplexer Stückgüter in produzierenden Unternehmen. Diese Lösungen sollten als anwendungsorientierte Beispiele am Lebenszyklus des zu montierenden Produktes und dem wirtschaftlich optimalen Automatisierungsgrad in der Montage ausgerichtet werden. Dabei konnten zwei unterschiedliche Gestaltungsfelder bearbeitet werden.
• kollaborative Montagesysteme
• wandlungsfähige Montageanlagen
Zum Ideenwettbewerb wurden insgesamt 41 Projektskizzen mit 345 Projektpartnern unter dem Stichwort ‚Kompetenz Montage – kollaborativ und wandlungsfähig (KoMo)‘ eingereicht.
Frei vernetzte wandlungsfähige Montage
Aus einer dieser Projektskizzen entstand das Forschungsprojekt freeMoVe. Unter diesem Begriff sollte eine wandlungsfähige Montage in frei vernetzten Systemen verstanden werden. Ziel war die Entwicklung einer neuen Organisationsform für die flexible hochvariante Montage in kleinen Stückzahlen bis Losgröße 1. Grundlage der neuen Organisationsform war die Möglichkeit, die Bearbeitungsorte und Reihenfolge für jedes Produkt individuell nach Verfügbarkeit festzulegen (sogenannte Auftragsroute). Hierfür wurden die Planung und Gestaltung, die Steuerung und Informationsbereitstellung sowie die erforderliche wandlungsfähige Technik weiterentwickelt. Neben der Entwicklung der Organisationsform entstanden auch verschiedene technologische Bausteine, unter anderem ein merkmalsbasiertes Steuerungs- und Leitsystem mit Plug&Produce-Funktionen, mobile Roboter, flexible Zuführ- und Greiftechnik sowie Stationstechnik.
Gestaltung und Steuerung frei verketteter Montagesysteme
Im Forschungsprojekt untersuchte das WZL der RWTH Aachen zusammen mit den Industrieanwendern Infineon, ZF Friedrichshafen oder Philips Innovation Services und den Ausrüstern Zimmer Group, Ifsys, Henkel+Roth sowie Istec die Gestaltung und Steuerung frei verketteter Montagesysteme. Auch das Fraunhofer IPT wurde zur Unterstützung in das Projekt eingebunden. Als frei verkettet wird eine Lösung bezeichnet, die für jedes Produkt eine individuelle Auftragsroute bereitstellt und damit eine flexible Montageabfolge ohne zeitliche oder räumliche Restriktionen ermöglicht. Im Gegensatz zu einem starr verketteten Montagesystem, in dem die Auftragsroute bei der Systemgestaltung festgelegt wird, sind für frei verkettete Montagesysteme dynamische Routen charakteristisch. Die Festlegung der Route erfolgt individuell für jeden Auftrag und wird unter Berücksichtigung der Verfügbarkeit geeigneter Montageressourcen kontinuierlich nachgeführt. Das Leitsystem setzt dabei Optimierungsalgorithmen für die größtmögliche Effizienz des Montagesystems ein.
Wandlungsfähige Stationstechnik
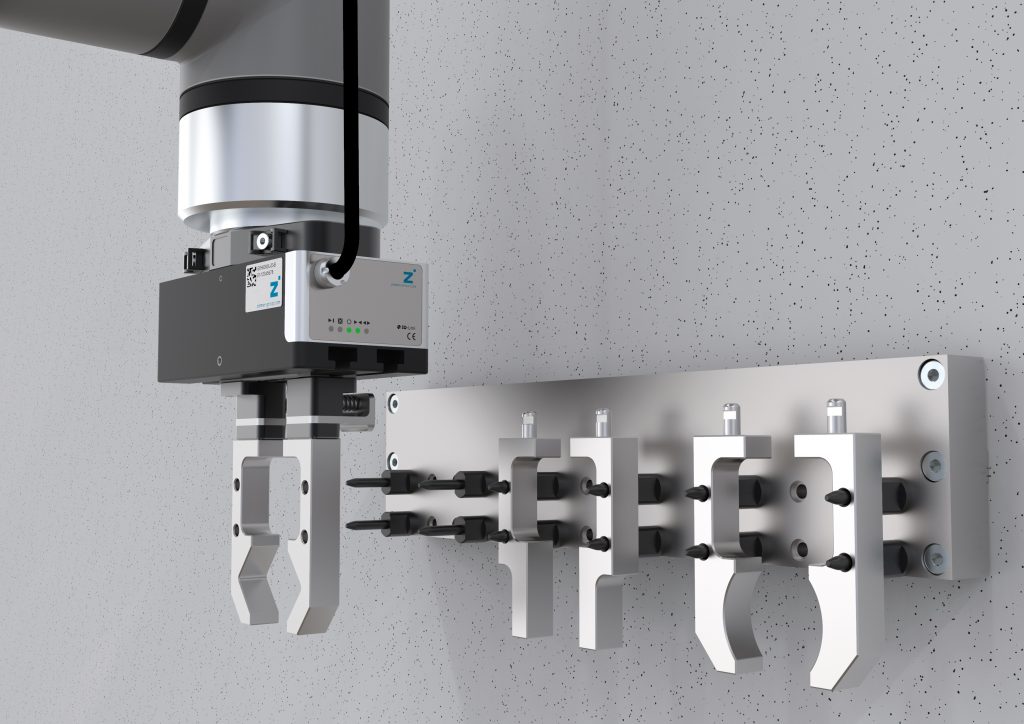
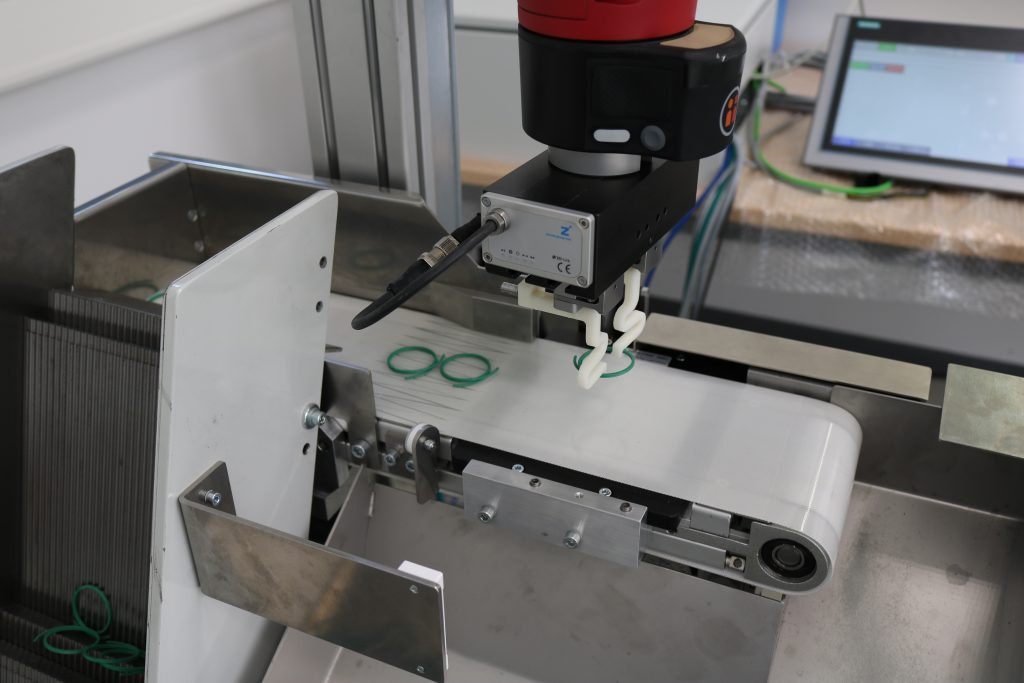
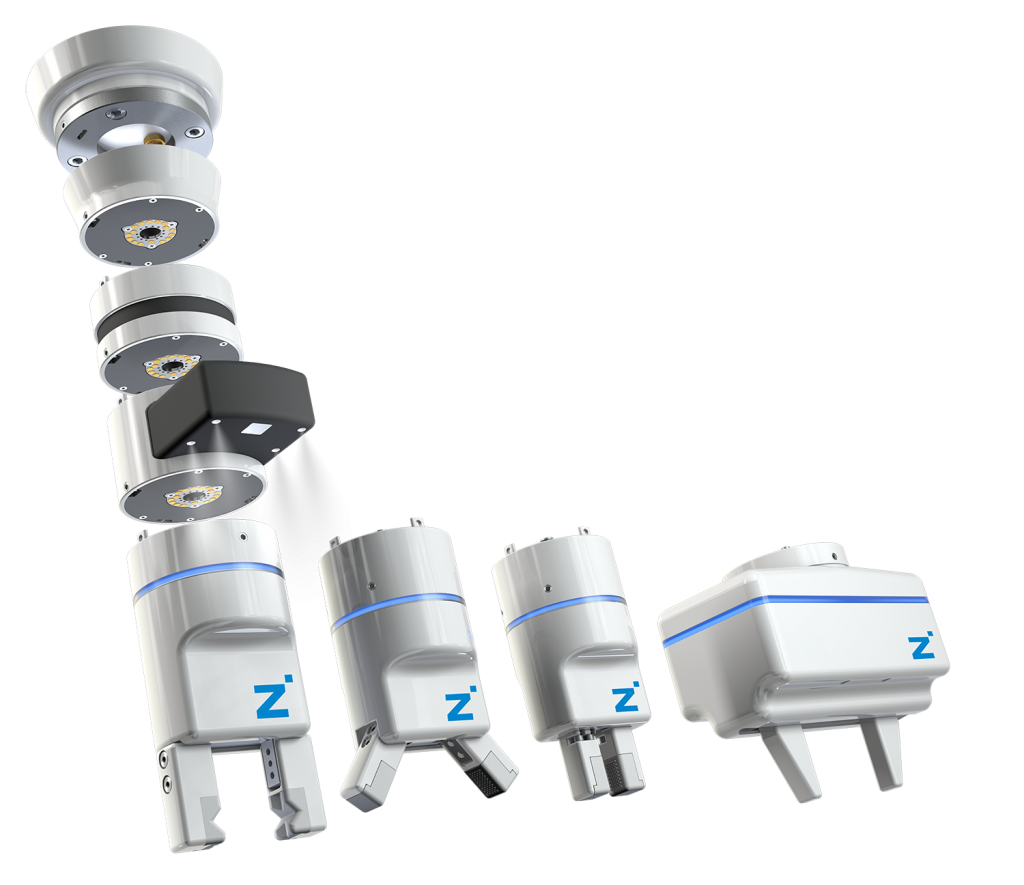
Die Zimmer Group zeichnete im Forschungsprojekt freeMoVe schwerpunktmäßig für die wandlungsfähige Stationstechnik verantwortlich. Dabei fokussierte das Unternehmen die Greiftechnik an mobilen Robotern bzw. die Entwicklung adaptiver und flexibler Greiflösungen. Das Handling von einzelnen Werkstücken oder Baugruppen ist eine elementare Tätigkeit in der industriellen Montage, deren Anpassung an wechselnde Produkte zeit- und kostenintensiv ist. Große regelbare Hub- und Greifkraftbereiche sowie ein einfaches Anpassen der Greifbackengeometrie sind wichtige Anforderungen an eine adaptive Greiftechnik. Die Zimmer Group hat im Rahmen des Forschungsprojektes drei adaptive Greifsysteme für unterschiedliche Anwendungsfälle entwickelt. Dabei wurden auch moderne elektrische Lösungen berücksichtigt, die durch die stufenlose Einstellbarkeit von Kraft und Geschwindigkeit ein taktiles Arbeiten ermöglichen.