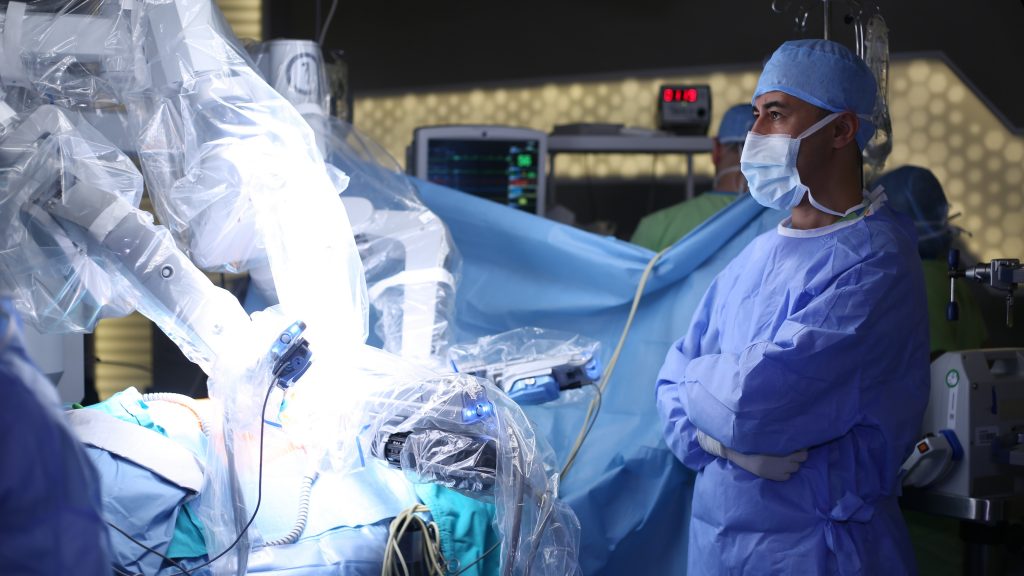
Operationsroboter stellen heute einen festen Bestandteil vieler Krankenhäuser und Kliniken dar. Allerdings operieren sie nicht eigenständig, der behandelnde Mediziner hat weiterhin die Oberhand. Während medizinische Geräte außerhalb des Operationssaals meist eigenständig oder automatisiert arbeiten, werden Operationsroboter in der Regel aktiv bedient und führen mittels intelligenter Software die Bewegungen des Roboters aus. Der Mediziner steuert die Bewegungen des Roboters von einer Bedienkonsole aus – bequem im Sitzen und mithilfe moderner Controller. Dabei überwacht er permanent die Bewegungen der Instrumente auf einem 3D-Bildschirm. So können auch bei mehrstündigen Operationen hochpräzise, zitterfreie und gleichmäßige Bewegungen garantiert werden.
Vorteile von Operationsrobotern
Die grundlegenden Vorteile der roboterassistierten Chirurgie liegen somit auf der Hand: außergewöhnliche Präzision sowie ausbleibende Ermüdungserscheinungen, welche kleinere Traumata und verkürzte Krankenhausaufenthalte ermöglichen. Operationsroboter dienen als Assistenz und kommen meist dort zum Einsatz, wo menschliche Fähigkeiten an ihre Grenzen stoßen – sowohl aus qualitativer als auch aus quantitativer Perspektive. Insbesondere im Rahmen minimal-invasiver Eingriffe, bei der sogenannten Schlüssellochchirurgie, kommen die Eigenschaften und Fähigkeiten moderner Operationsroboter zum Tragen. Hier stehen sehr kleine, wenige Millimeter große Schnitte im Vordergrund. Zum einen soll der Patient so vor langwierigen, postoperativen Beschwerden geschützt werden; zum anderen sollen kürzere Krankenhausaufenthalte und eine bessere Kosmetik, vordergründig eine dezentere Narbenbildung, die Folge sein. Weil das menschliche Können bei einer solch präzisen Arbeit an seine Grenzen stößt, kommen Operationsroboter zum Einsatz. Durch den Operateur angewiesene Bewegungen können bei Bedarf in einem kleineren Maßstab wiedergegeben und mittels Roboterarm ausgeführt werden. Auf diese Weise gelingen Zehntelmillimeter genaue Schnitte.
Aufbau von Operationsrobotern
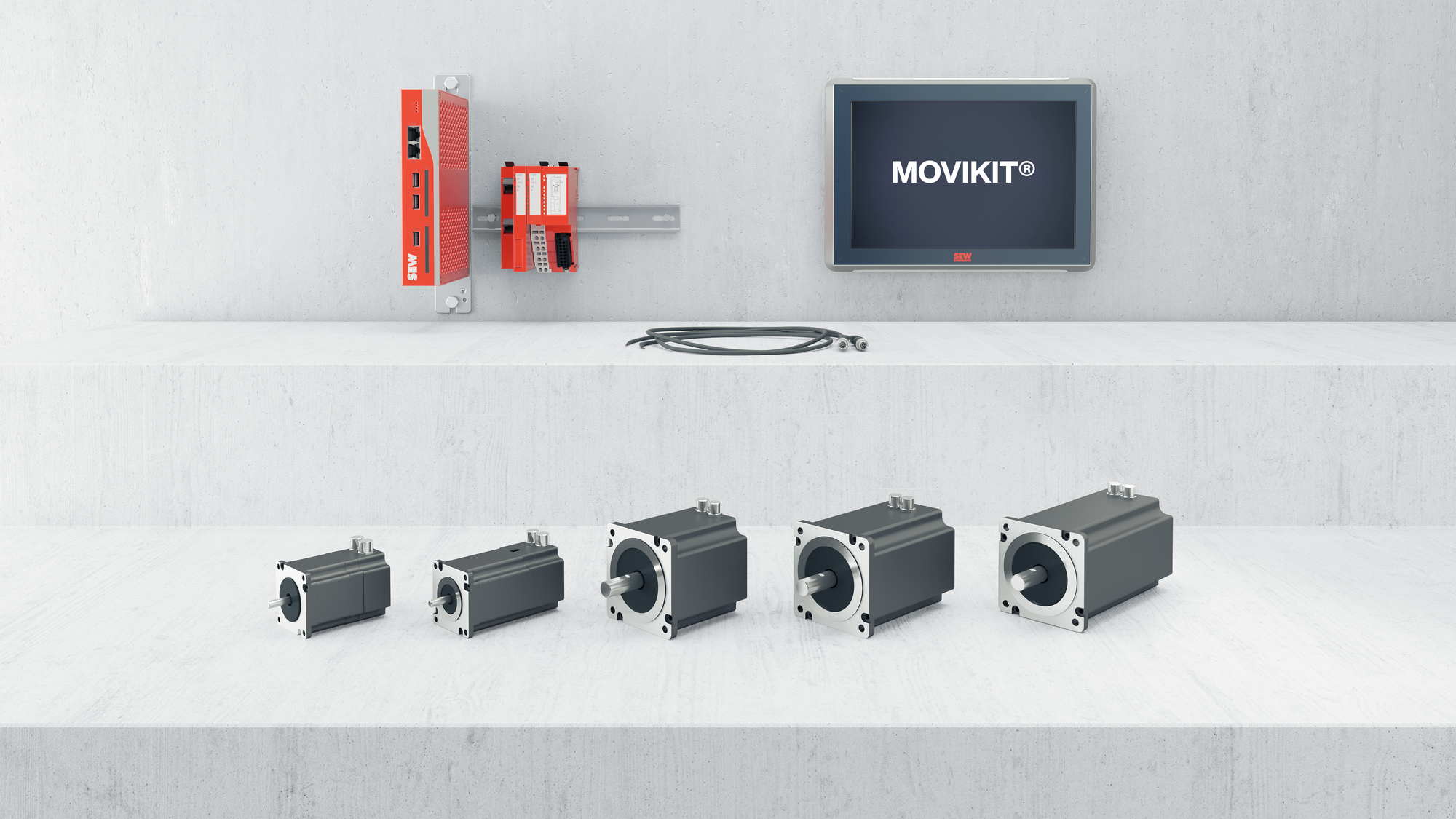
Während sich Operationsroboter hinsichtlich Größe und Form auf unterschiedliche Art und Weise ausprägen, verfügen sie oftmals über einen ähnlichen Aufbau bzw. verwandte Komponenten. Als Basis dienen demnach in der Regel eine Steuereinheit sowie ein oder mehrere Roboterarme, welche aus einzelnen Segmenten mit Gelenken, Sensorik, Antriebssystemen und einer Schnittstelle für das Operationsinstrument bestehen. Letztere wird als Bindeglied zwischen Operationsroboter und Umwelt verstanden, weil er – etwa in Form einer Pinzette, einer Schere oder eines Skalpells- den Kontakt zum menschlichen Körper herstellt.
Operationsroboter im Einsatz
Beim Einsatz von Operationsrobotern lassen sich die einzelnen Elemente des Roboters, etwa der Manipulator, je nach Konstruktion frei im Raum bewegen. So können sie Bewegungen ausführen und Positionen einnehmen, welche sich für den Menschen als problematisch erweisen oder schlichtweg nicht möglich sind. Zum anderen machen Operationsroboter ein genaues als auch nachhaltiges Arbeiten möglich und gewähren durch integrierte Bildgebungsverfahren und Kameraeinstellungen besondere Einblicke. Der Arzt kann die Operation aus einer gewissen Distanz leiten, da er die Bewegungen und Aktionen des Roboters mithilfe einer externen Steuerkonsole leitet. Letztere ist mit einem Sichtvisier verknüpft, das dem Operateur einen Blick auf das Geschehen bietet. Die Präsenz direkt am Operationstisch ist demzufolge nicht notwendig. Darüber hinaus arbeiten Medizinroboter losgelöst von mentalen, emotionalen Impulsen und ermöglichen folglich hohe Präzision – aus räumlicher, aber auch aus zeitlicher Perspektive. Das Einsatzspektrum der Operationsroboter ist seit den ersten Versuchen mit dem Robodoc in den 90er Jahren stetig weiterentwickelt worden. Heutzutage werden die beschriebenen Assistenten unter anderem in der Urologie, Neurologie, im HNO-Bereich oder der Orthopädie eingesetzt. Neben etablierten Herstellern bieten auch Start-Ups für unterschiedliche Operationsziele Lösungen auf dem Markt an.
Getriebe trotzen hohen Anforderungen
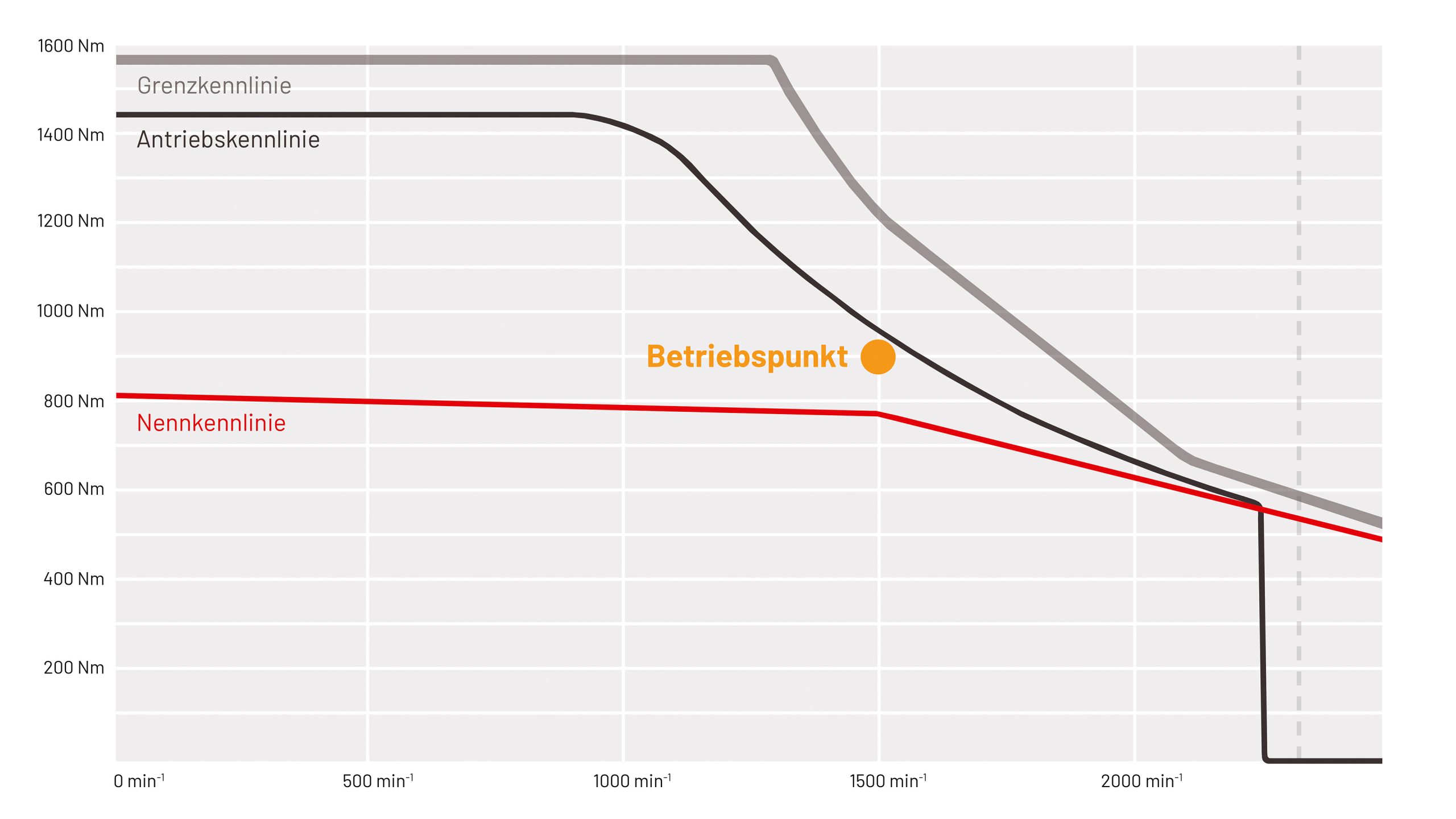
Um höchstmögliche Präzision zu gewährleisten, müssen in Robotergelenken eingesetzte Getriebe hohen Anforderungen trotzen. Achsen von Robotern müssen bei der Beschleunigung und Verzögerung des Roboters hohe Drehmomente übertragen. Gleichzeitig darf der Antrieb selbst nur ein geringes Eigengewicht und sehr kompakte Abmessungen aufweisen. Je weiter der Gelenkantrieb von der ersten Achse entfernt ist, desto leichter sollte er sein, denn sein Gewicht erhöht das Massenträgheitsmoment für die vorgeschalteten Achsen und reduziert somit die Dynamik sowie die Traglast des Roboters. Dabei spielt nicht nur das eigentliche Gewicht des Getriebes eine Rolle, sondern auch seine Abmessungen. Denn mit zunehmender Größe des Getriebes wächst auch das Gewicht der Strukturteile, wie der Gehäuse, überproportional. Speziell die weiter entfernten Handachsen müssen daher hohe Drehmomente bei geringem Gewicht und kleinen Abmessungen bereitstellen.
Besondere Drehmomentdichte
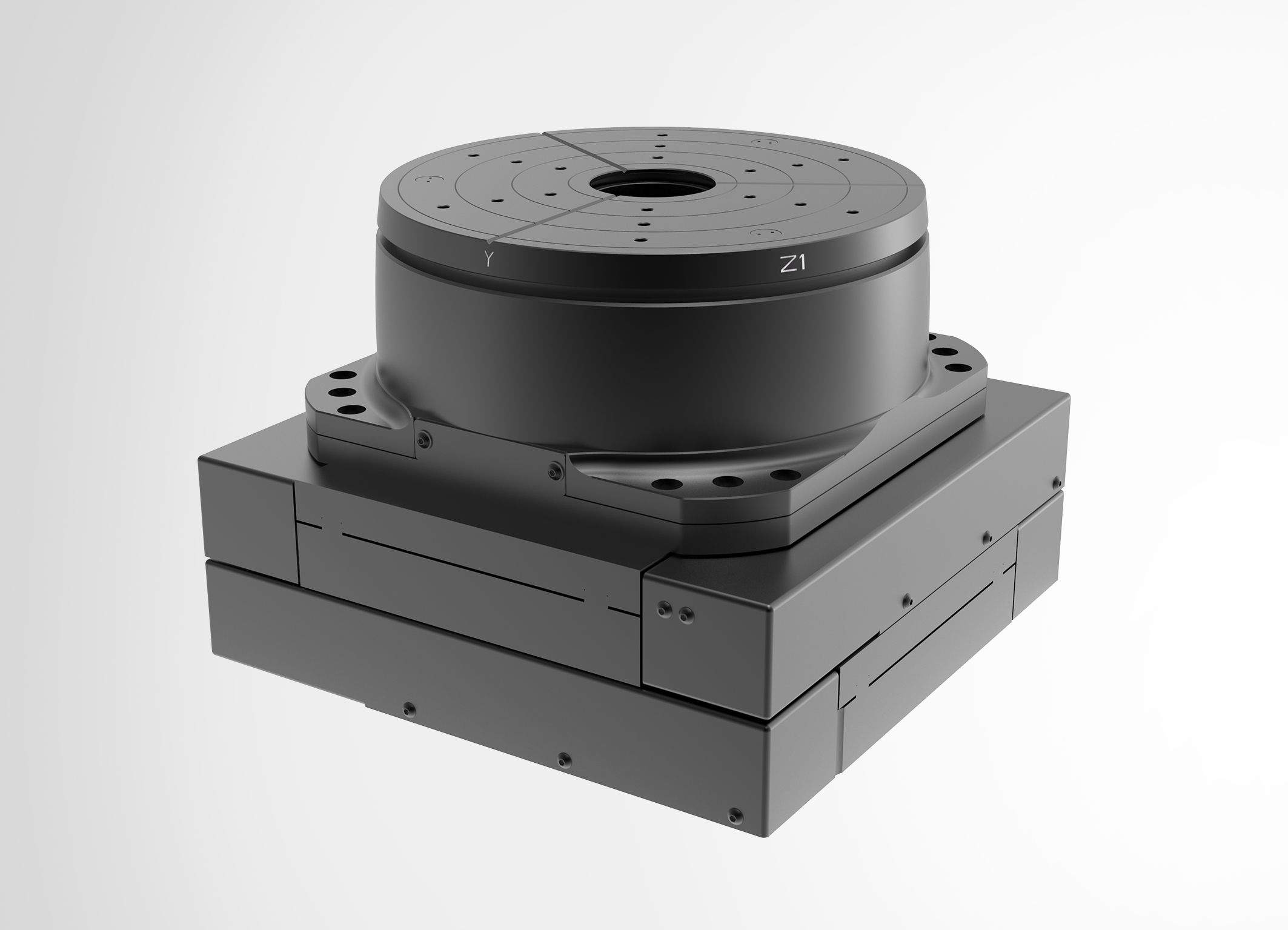
Die in Operationsrobotern eingesetzten Harmonic-Drive-Getriebe mit Abtriebslager SHG-2SH zeichnen sich durch besonders hohe Drehmomentdichte aus. Sie ergibt sich aus ihrem besonderen Funktionsprinzip. Bei einem Wellgetriebe sind untersetzungsabhängig bis zu 30 Prozent aller Zähne gleichzeitig im Eingriff, wodurch sich die Belastung auf viele Zähne und symmetrische Belastungszonen verteilt. Durch ein optimiertes Zahnprofil und eine bessere Lastverteilung im Wave Generator-Lager wurden die übertragbaren Drehmomente der SHG-Getriebe um rund 30 Prozent gegenüber dem Vorgängerprodukt HFUS gesteigert. Das Getriebe trägt somit zu einer höheren Dynamik und einer Verkürzung der Taktzeiten beim Bauteil-Handling bei. Das SHG-2SH Getriebe besteht ausschließlich aus dem Einbausatz und dem Abtriebslager. Durch Nutzung der vorhandenen Gehäusestruktur zur Abstützung der Lager der Eingangswelle kann auf einen separaten An- und Abtriebsflansch verzichtet und das Gesamtgewicht deutlich reduziert werden. Somit eignet sich diese Bauform ideal für die bewegten Roboterachsen, bei denen die Reduktion des Gewichtes eine deutliche Verbesserung der Dynamik und Tragfähigkeit des Roboterarms zur Folge hat.