Das Systemhaus Koco Motion bietet verschiedene Linearaktuatoren für den Einsatz in einem breiten Spektrum von Anwendungen, die eine Kombination aus präziser Positionierung, schneller Bewegung und langer Lebensdauer erfordern. „Die kundenspezifischen Ausführungen werden bei uns zunehmend nachgefragt“, sagt Olaf Kämmerling, Geschäftsführer von Koco Motion. „Wir haben das Knowhow, um dem Anwender die für seine Anwendung passende Lösung aus den uns zur Verfügung stehenden Möglichkeiten herauszuarbeiten“. Auf Basis der Schrittmotortechnik werden die Linearaktuatoren in den zwei Technologien Permanentmagnet (PM) und Hybrid angeboten.

Schrittmotor-Linearaktuator für kleine Abmessungen
Der Rotor beim PM-Motor besteht aus einem radialmagnetisierten Permanentmagneten. Daher können nur begrenzte Zahlen von magnetischen Polen hergestellt werden, was einen größeren Schrittwinkel zur Folge hat. Diese Technologie ist kostengünstig und auch für kleinere Abmessungen realisierbar. Die Schrittmotor-Linearaktuatoren haben eine runde Form und stehen in drei Größen mit Durchmesser 20, 25 und 36mm zur Verfügung. Die Auflösung der Linearbewegung variiert von 6,5 bis 333µm/Schritt bei einer maximalen Schubkraft von 115N, abhängig von Antriebsgröße, Spindelsteigung und Schrittauflösung.
Hybridschrittmotor-Linearaktuator für hohe Polzahlen
Der Hybridschrittmotor kombiniert zwei Antriebstechnologien: Er ist eine Symbiose aus Reluktanz- und Permanentmagnetmotor. Auf den axialen Permanentmagneten werden gezahnte Metallkappen befestigt. Der Versatz um eine halbe Zahnbreite sorgt dafür, dass sich die Nord- und Südpole abwechseln. Diese Technik gestattet hohe Polzahlen und somit sehr kleine Schrittwinkel. Die Hybrid-Schrittmotor-Linearaktuatoren stehen in den Baugrößen Nema 8, 11, 14, 17, 23, 24 und 34 zur Verfügung. Abhängig von Schrittwinkel und Spindelsteigung variiert die Auflösung der Linearbewegung von 1,5 bis 127µm/Schritt bei einer max. Schub/Zugkraft von bis zu 2400N.
Kugelumlaufspindel erhöht Performance
„Anhand der genannten Daten ermitteln wir die Motorgröße und die Spindelsteigung sowie die Ausführung der Spindelmutter. Weitere wichtige Aspekte sind auch die mögliche Selbsthemmung, der zur Verfügung stehende Bauraum und die Ansteuerung des Antriebs“, erläutert Kämmerling. Reicht die standardmäßig eingesetzte Trapezspindel für die Anwendung nicht aus, kann eine Kugelumlaufspindel die Performance erhöhen: Mit ihr lassen sich noch genauere Positionierungen, ein geringes Umkehrspiel, geringere Reibungen, eine besonders hohe Lebensdauer und starke Beanspruchungen umsetzen. Zudem werden durch die Vielzahl an Güteklassen, Steigungen, Bauarten und Längen die meisten Kundenforderungen erfüllt. Beide Technologien gibt es mit Wicklungsanschlüssen für unipolare oder bipolare Ansteuerung, wobei bipolar angesteuert inzwischen gängig ist. Die Linearaktuatoren werden entweder mit Hohlwellenmutter und Spindel (ohne oder mit interner Verdrehsicherung) angeboten oder mit externer Spindel und Mutter.
Vier unterschiedliche Bauweisen
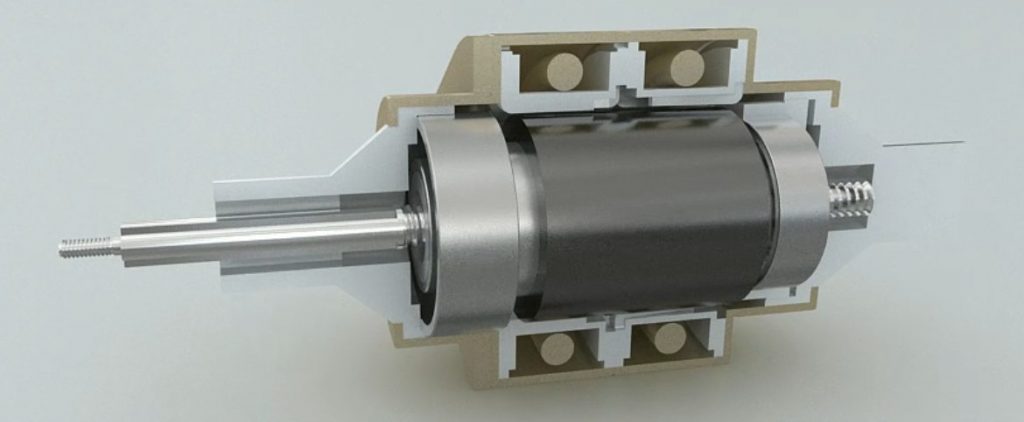
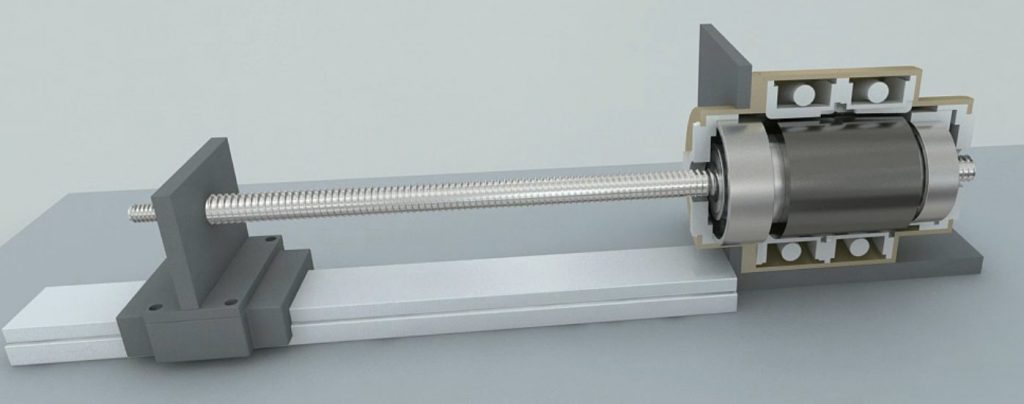
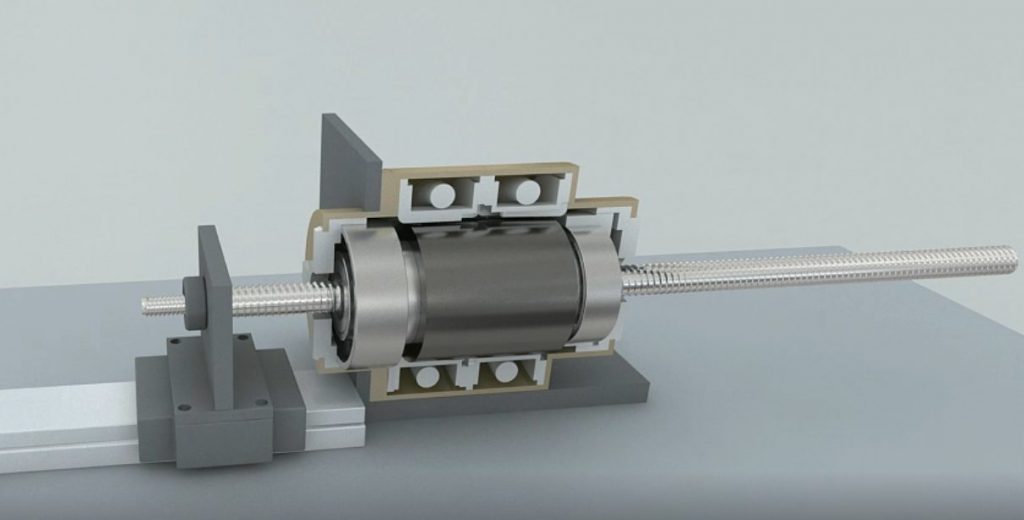
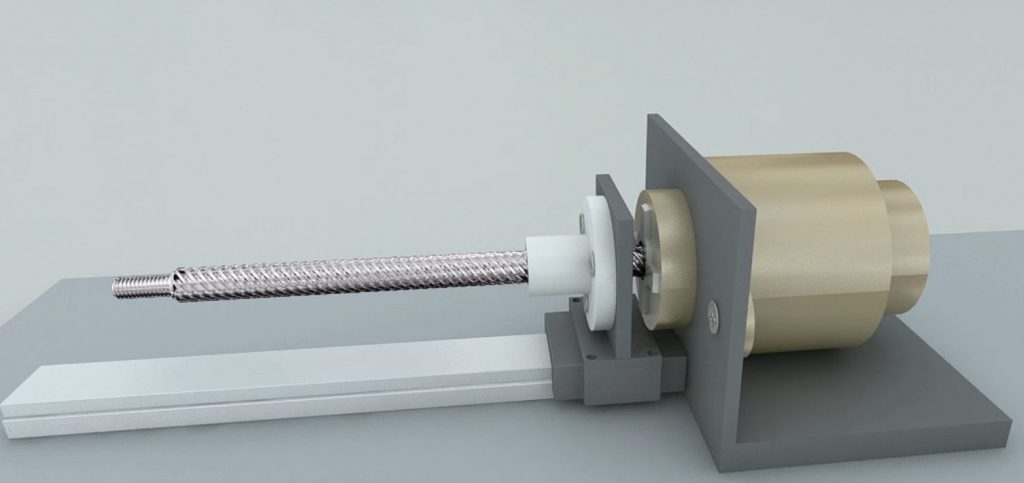
Beide Versionen stehen in den Ausführungen External, Non-Captive und Captive C bzw. Captive K zur Verfügung. Bei der Ausführung External wird die Linearbewegung erreicht, indem die Mutter auf der als Motorwelle arbeitende Spindel gegen Verdrehen gesichert ist. In dem zu bewegenden Schlitten wird die Mutter befestigt und durch die Drehbewegung der Spindel linear bewegt. Der Schlitten muss hierbei kundenseitig geführt werden. Um eine lange Lebensdauer zu erzielen und die Reibkräfte zu reduzieren, ist es wichtig, die Führung zur Drehachse genau anzupassen. Der Anwender muss sich hier selbst um die Verdrehsicherung kümmern, indem er z.B. eine Führungsschiene anbringt. Bei längeren Spindeln muss das freie Spindelende eventuell noch gegengelagert werden. Bei der Non-Captive-Variante ist in der Hohlwelle des Motors die Mutter eingebracht. Ihre Drehung verursacht eine lineare Bewegung der Spindel. Wird hier die Spindel fixiert, bewegt sich der Motor hin und her. Ist der Motor fixiert, sitzt die Masse am Ende verdrehgesichert auf der Spindel. Die Captive-C-Ausführung (geschlossenes System) eignet sich für raue Umgebungsbedingungen. Hier entsteht die Linearbewegung durch die bereits intern verdrehgesicherte Schubstange. Die Schubstange hat ein Innengewinde und eine Verdrehsicherung und wird in einem speziell geformten Gehäuse geführt. Dreht sich der Rotor (Spindel), dann entsteht über dem Gewindetrieb eine Linearbewegung und die Schubstange fährt ein und aus. Da die Verdrehsicherung bereits integriert ist, hat der Kunde bei dieser Variante den geringsten konstruktiven Aufwand. Die Last wird am Ende der Schubstange fixiert. Die Captive-K-Version unterscheidet sich von der Captive C durch den Antrieb. Die Schubstange ist vorne genutet und damit verdrehgesichert geführt. Diese Ausführung bildet zusammen mit der Gewindespindel den Antrieb. Dreht sich der Rotor, fährt die Schubstange ein oder aus. Zu beachten ist hier, dass die Spindel auf der Rückseite in Abhängigkeit des Hubs ausfahren kann. Die jüngste Variante stellt wegen ihrer kleineren Bauform gegenüber der Captive-C-Variante in vielen Anwendungen eine gute Alternative dar.
Großes Anwendungspotenzial
„Die Linearaktuatoren finden überall dort Einsatz, wo eine lineare Positionierung stattfindet“, sagt Kämmerling. Generell unterscheiden sich die Anwendungen nicht aufgrund der eingesetzten Bauart der Aktuatoren. Ihre Auswahl hängt vielmehr von der Philosophie der Kunden, den Gegebenheiten im Unternehmen oder von Faktoren wie Preis bzw. zur Verfügung stehender Bauraum ab. Für die Fabrik der Zukunft bzw. Industrie-4.0-Anwendungen stehen die MDrive und Lexium MDrive-Antriebe mit den bekannten Schnittstellen RS485/Modbus, CANopen, Ethernet und Profinet zur Verfügung. Oder sie lassen sich über die KannMotion-Steuerung mit einer RS485 oder einem Ablaufprogramm I/O Steuerung komplettieren.