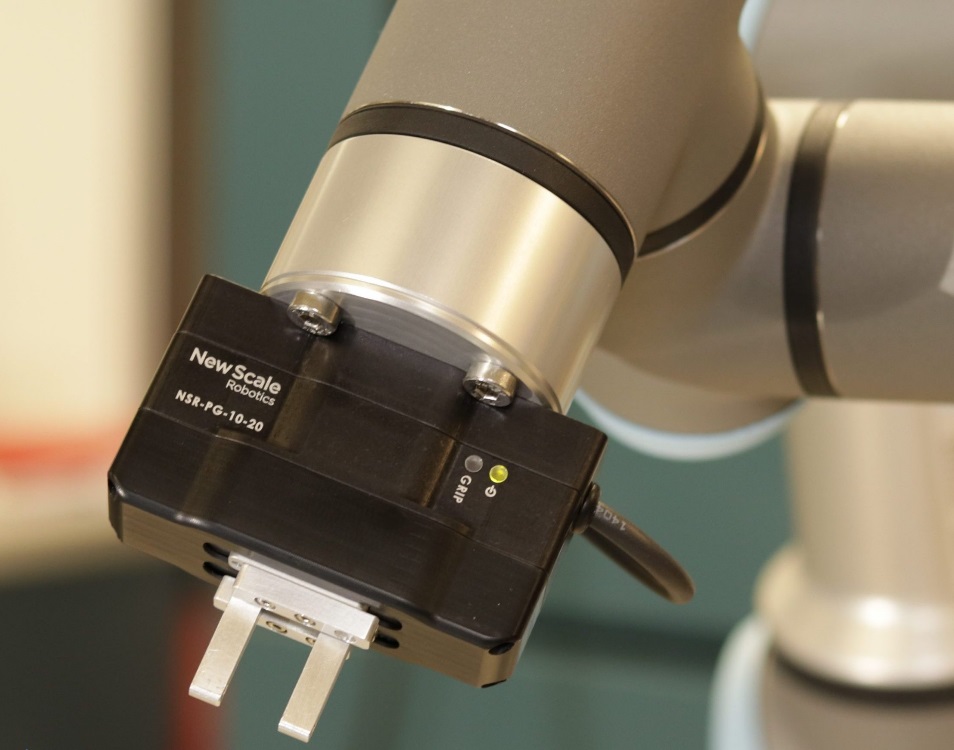
Der Präzisions-Parallelgreifer NSR-PG von SI ist speziell für UR-Robter konzipiert. Seine geringe Größe dient der schnellen Positionierung auf engem Raum, z.B. bei komplizierten Teilehandhabungs- und Montageaufgaben. Sowohl die Greifkraft bis 10N als auch die Geschwindigkeit bis 30mm/s sind über das Handgerät programmierbar. Der Greifer lässt sich schnell an einem UR-Roboterflansch installieren. Er kann verschiedene Aufgaben wie das Greifen, Messen, Sortieren und Montieren von kleinen Teilen bewältigen. Der Greifer wird mit werksseitigen Fingern geliefert, die sich einfach austauschen lassen, indem die Referenzmontageoberflächen mit präzisen Stiftpositionen angebracht werden. Durch den Download von Zeichnungen und CAD-Modellen lassen sich individuelle Greiferfinger erstellen. Geschwindigkeit, Kraft und andere Parameter sind über die grafische Oberfläche programmierbar.