
2D-Vision stößt an ihre Grenzen, wenn Tiefeninformation der z-Achse benötigt wird. So reicht sie zum Beispiel beim automatischen Befüllen von Getränkekisten oder Batteriepacks zwar für die Anwesenheitskontrolle, aber nicht für die Überprüfung der dreidimensionalen Ausrichtung der Zielobjekte. Für eine höhergradige Automatisierung ist eine detaillierte Situationserfassung in drei Dimensionen erforderlich. Zum Wachstum des 3D-Segments trägt weiterhin der zunehmende Einsatz fahrerloser Transportfahrzeuge (FTF, oder Automated Guided Vehicle, AGV) in der Lager- und Produktionslogistik bei. Hier sind Reichweite und hohe Dynamik gefragt, um die Fahrzeugsteuerung jederzeit mit validen Orientierungspunkten zu versorgen und auch unerwartet auftauchenden Hindernissen ausweichen zu können. In der Qualitätssicherung blickt der 3D-Sensor dagegen meist aus einer fixierten Perspektive auf einen genau definierten Erfassungsbereich. Dies erfordert eine hohe Auflösung und feine Differenzierung.
All in one
Die Serie SmartRunner Explorer 3D umfasst Sensoren in zwei Ausführungen: Stereo-Vision für die 3D-Erfassung im Nahbereich und Time-of-Flight (ToF) für die Überwachung eines Bereichs bis 10m. Es handelt sich in beiden Fällen um Rohdatensensoren, die kalibriert ausgeliefert werden. Sie verwenden eine identisch standardisierte Datenstruktur und dieselbe Anwendersoftware ViSolution mit einer intuitiven Benutzerführung. Die Software wird mit den Geräten kostenfrei zur Verfügung gestellt. Die aufgabenspezifische Visualisierung von 2D- und 3D-Daten wird mit wenigen Klicks aufgebaut.
Nach der Inbetriebnahme eines ersten Gerätes der SmartRunner Explorer 3D-Serie können weitere Geräte in beiden Varianten und für unterschiedliche Anwendungsspektren durch Duplizieren integriert werden. Das Ethernet Gigabit Interface ermöglicht eine schnelle Datenübertragung. Das einheitliche hochstabile Aluminiumgehäuse leitet die Betriebswärme ab und gleicht unerwünschte Temperatureinflüsse aus. Beim Gerätetausch gilt Plug&Play, eine Neukalibrierung entfällt. Die Montage wird durch ein Ausrichtlineal und Ausrichtungsbohrungen am Gehäuse unterstützt. Zusammen können die beiden Gerätevarianten die allermeisten 3D-Anwendungen für Vision-Sensoren in der industriellen Praxis abdecken – von der präzisen Objektvermessung auf Förderbändern bis zur exakten Positionierung von Roboterarmen.
Inspektion mit Stereo-Vision
Das Stereo-Vision-Gerät ist mit seiner Reichweite 1m und einer Auflösung von 1,4MP für die präzise Erfassung von Objekten in diesem Nahbereich optimiert und insbesondere für Inspektionsanwendungen geeignet. Sein Detektionsbereich hat im Abstand von 600mm eine Größe von 400×350 sowie 550x500mm bei 900mm Distanz. Das Gerät verfügt über zwei Kameras für eine tiefenscharfe 3D-Erfassung. Zunächst überlagert der Sensor die aufgenommenen 2D-Bilder automatisch zu einem Disparitätenbild. Anhand der hochaufgelösten 2D-Bilder kann die Ausrichtung auf den gewünschten Erfassungsbereich vorgenommen werden, was die Interpretation der Messergebnisse vereinfacht. Nach den Anpassungen entsteht das gewünschte 3D-Punktwolkenbild, das den gesamten Messbereich präzise und hochaufgelöst abbildet.
Im Einsatz: Verpackung und in Bäckerei
Der Smartrunner 3D Stereo-Vision kann beispielsweise für die Prüfung und Zählung von definierten Objekten oder zur Volumenerfassung von eingesetzt werden. Eine typische Anwendung ist die Erfassung der Dimensionen von Verpackungseinheiten, um beispielsweise eine Versandkiste optimal zu bestücken. Auf dem 3D-Bild des Gerätes wird jeder Überstand zuverlässig angezeigt, bei gleichzeitiger Erfassung des Füllgrads.
Ebenso ist die Qualitätskontrolle beispielsweise in Großbäckereien ein mögliches Einsatzgebiet. Dort werden Teigfladen automatisch portioniert und zur Weiterverarbeitung befördert. Ein Sensor über dem Förderband vermisst die Ausmaße in 3-D und stellt sicher, dass die Fladen das vorgegebene Volumen haben.
Dynamische Datenausgabe mit Time-of-Flight
Das Time-of-Flight-Verfahren zeichnet sich vor allem durch seine Reichweite und Signalfrequenz aus. Erfassung sowie Ausgabe der Signale sind hier für Anwendungen mit größerem Messbereich und kurzen Reaktionszeiten optimiert. Der ToF-Sensor besteht aus einer einzelnen Kamera mit einer VGA-Auflösung von 640×480 Pixel, die durch eine hohe Messrate von 30Hz die Grundlage für einen ausgedehnten Messbereich und eine schnelle Reaktion in der Maschinensteuerung schafft.
Eine weitere Stärke ist die Unempfindlichkeit des Sensors gegenüber Fremdlicht. Sie beruht auf dem Infrarotlicht, die er mit seiner DuraBeam-Beleuchtung emittiert. Dessen Wellenlänge von 940nm hat einen genügend großen Abstand vom Frequenzbereich des natürlichen Tageslichts ebenso wie von künstlicher Beleuchtung, sodass die Detektion im Innen- sowie Außenbereich von den Lichtverhältnissen unbeeinträchtigt bleibt. Die Detektion per 4-Phasen-Messung steigert zusätzlich die Robustheit des Nutzsignals sowie der Messergebnisse.
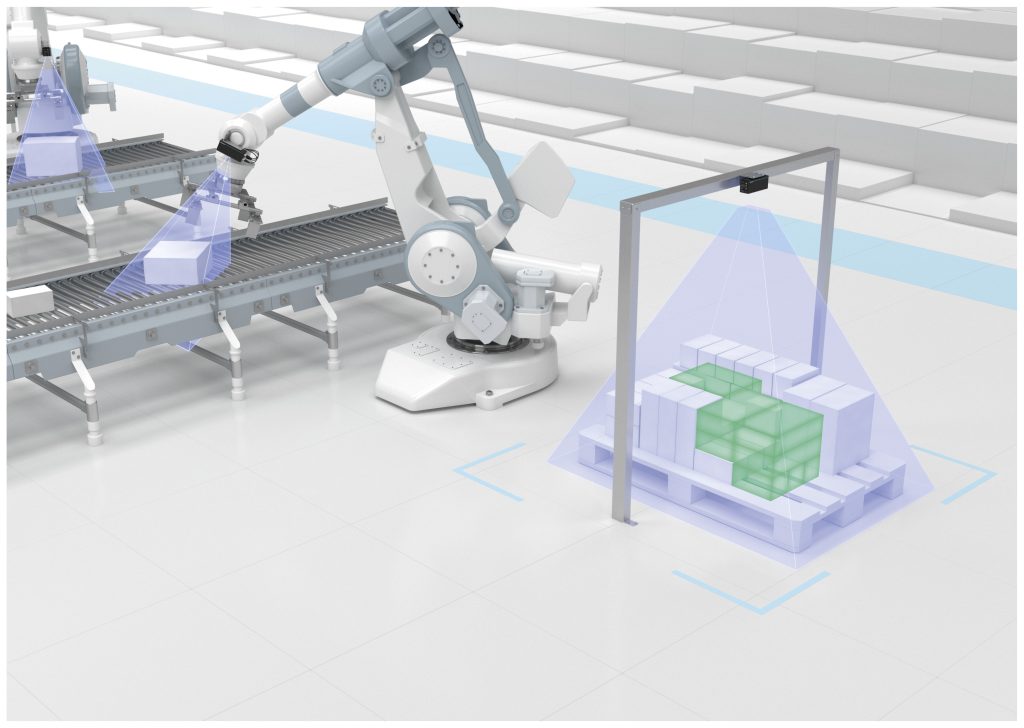
Im Einsatz: Palettierung und AGV
Die Kamera nimmt ein zweidimensionales z-Bild auf, wobei sie auch die Distanz zwischen Objekt und Sensor ermittelt. So entsteht ein Tiefenbild mit einer Höhenkarte, welche mit 2D-Informationen in x- und y-Richtung kombiniert wird. Zusammen ergibt dies ein 3D-Punktwolkenbild mit hoher Auflösung. Es bietet die Grundlage für eine 3D-Orientierung in der Bewegung, etwa zur Palettierung oder bei der AGV-Steuerung.
Bei der Palettierung erkennt ein Sensor am Roboterarm das auf dem Förderband ankommende Paket und erfasst seine Abmessungen. Ein weiterer Sensor über der Palette erkennt die noch verfügbaren Plätze. Die Steuerung kann die Pakete auf der Palette nach bestimmten Vorgaben zusammenstellen und unter bestmöglicher Nutzung des Platzes stapeln lassen. Für die AGV-Steuerung wird ein Sensor in Fahrtrichtung zur Erkennung von Hindernissen und angesteuerter Strukturen angebracht. Mit seinen Daten kann zum Beispiel eine Staplergabel in die Aussparungen im Palettenfuß oder ein Transportroboter unter ein anzuhebendes Objekt gesteuert werden.








