Das Modell der Apps macht es jedem möglich, eigene Anwendungen für Smartphones oder Tablets zu entwickeln. Nicht mehr nur die Gerätehersteller können auf den Bedarf des Marktes reagieren. Stattdessen kann sich der Anwender selbst eine Lösung für sein Problem schaffen oder von Spezialisten maßschneidern lassen. Mit diesem Konzept wurde das Telefon zur Plattform und konnte sein ursprüngliches Anwendungsgebiet weit hinter sich lassen. Das Konzept der Mehrwertdienste für cloudbasierte Steuerungsplattformen, wie im Projekt Picasso entwickelt, will genau hier ansetzen. Auf Basis einheitlicher Schnittstellen öffnen sich die Steuerungen von Maschinen und Anlagen und binden spezialisierte Zusatzdienste ein. Hierbei ist aus technischer Sicht unerheblich, ob diese Dienste am selben Standort, im gleichen Unternehmen oder auf externen Plattformen bereitgestellt werden. Entscheidend für die Standortwahl des Dienstes sind die Anforderungen an Sicherheit und Know-how-Schutz, Abrechenbarkeit, Rechenleistung, Bandbreite und Kommunikationsverzögerung. Neben der reinen Möglichkeit der eigens realisierten Anwendungen war bei mobilen Geräten noch ein zweiter Faktor erfolgsentscheidend: die App-Stores. Erst durch sie gibt es einen einheitlichen Marktplatz, auf dem Anbieter und Käufer zusammenfinden. Ein vergleichbares Konzept ist auch für Mehrwertdienste in cloudbasierten Steuerungen notwendig.
Gelbe Seiten für Industrie 4.0
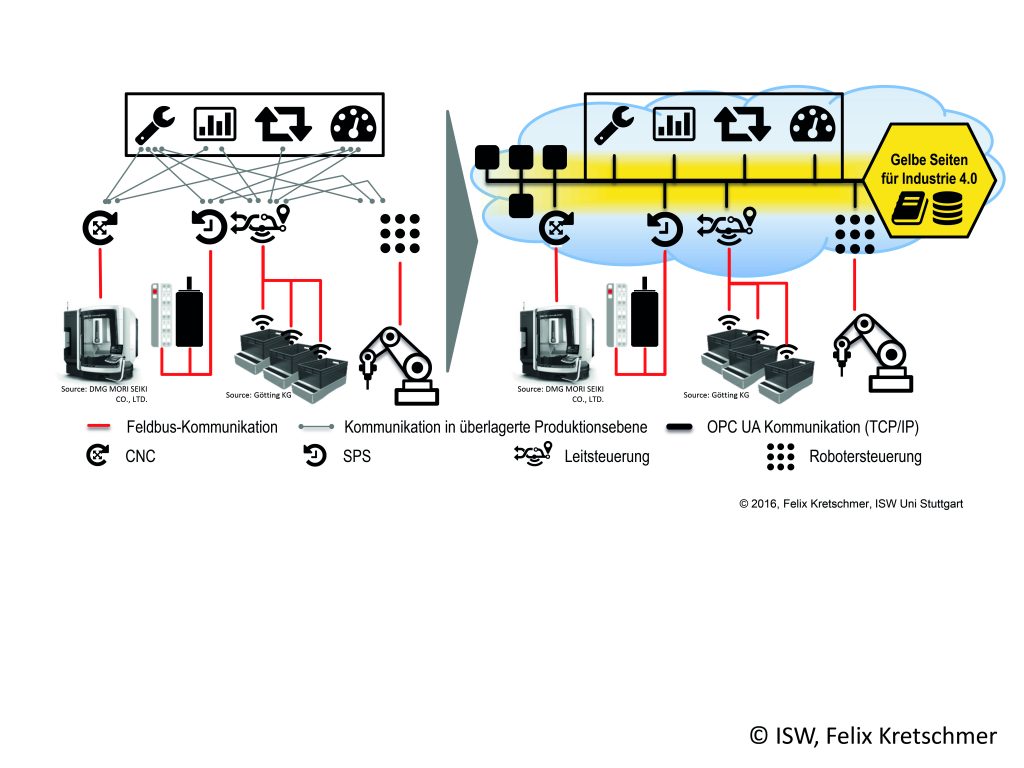
In klassischen Produktionsnetzen sind die Kommunikationsbeziehungen von Leitsystemen, Maschinen und netzwerkfähigen Geräten statisch konfiguriert und laufen über Punkt-zu-Punkt-Verbindungen. Der Zugriff auf entstehende Daten, die nicht schon im Leitsystem erfasst werden, ist nur schwer möglich, da deren Verfügbarkeit nicht global bekannt ist. Das Konzept der Gelben Seiten für Industrie 4.0 (GESI) besteht aus einem zentralen Verzeichnis, in dem sich alle Datenquellen anmelden und so die verfügbaren Daten anbieten. Basis für diesen Verzeichnisdienst ist ein OPC UA Server. Die Datenquellen, z.B. Maschinen, Sensoren oder Mehrwertdienste, sind hierarchisch nach Unternehmen und Organisationseinheiten strukturiert aufgeführt. GESI bricht somit die statischen Verbindungen auf und ermöglicht eine – auf die Automatisierungspyramide bezogen – nicht-hierarchische Kommunikation, die aufgrund der standardisierten TCP-Kommunikation von OPC UA auch für die IT-Abteilungen ein einfaches Management ermöglicht. Durch einheitliche in GESI gepflegte Schnittstellenbeschreibungen ist die Verknüpfung von Datenquellen und Abnehmern leicht möglich. Die Festlegung der Datenpartner erfolgt dabei entweder durch den Endanwender oder auch automatisiert, indem Dienste nach passenden Quellen suchen. Eine Beschreibung der Semantik der angebotenen Daten ist vorgesehen und durch die Nutzung von OPC Companion Specifications wird ein standardisierter Austausch von Informationen ermöglicht. Neben den reinen Daten ist auch die Bekanntgabe von Kommunikationsendpunkten möglich, um Querkommunikation über individuelle Protokolle zu ermöglichen. Der Nutzen der Gelben Seiten und die Verknüpfung unterschiedlicher Dienste werden im Folgenden an konkreten Beispielen dargestellt.
Integration von Diensten in Robotersteuerungen
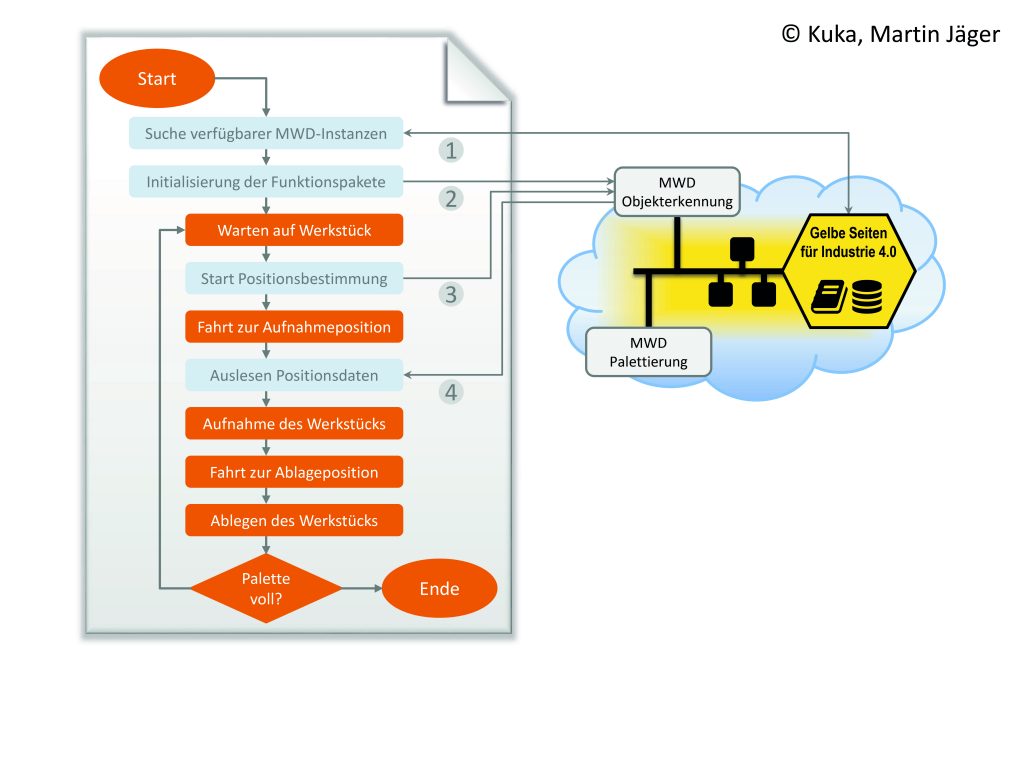
Kuka Industries erforscht im Rahmen des ISW-Projektes Picasso verschiedene Wege, um die Erweiterung von Robotersteuerungen mit Cloud-Funktionen zu erreichen. Innerhalb dieser Artikelserie ist bereits die Implementierung des App-Prinzips für Robotersteuerungen im SPS-MAGAZIN 9/2016 vorgestellt worden. Apps von Robotern sind dabei eher kleine und ressourcensparende Anwendungen, die aus der Cloud geladen, jedoch lokal installiert und ausgeführt werden. Im Unterschied dazu laufen Mehrwertdienste innerhalb der Cloud-Infrastruktur und belasten nicht die lokalen, beschränkten Ressourcen der Steuerung. Der Aufruf der Dienste aus einem Roboterprogramm heraus wird über GESI vermittelt. Jeder Dienst meldet dazu bestimmte Funktionspakete als definierte Schnittstellen an. Mittels vorkonfigurierter Programmiermakros in der Robotersteuerung zum Lesen, Schreiben und Abonnieren (asynchrone Rückmeldung von geänderten Werten) von Variablen in GESI werden dem Dienst notwendige Konfigurationsparameter übertragen sowie Berechnungsergebnisse zurückgeliefert. Ein exemplarisches Roboterprogramm, das Systemfunktionen und Mehrwertdienste kombiniert, ist in Bild 2 dargestellt. Zunächst wird in den Gelben Seiten eine verfügbare Instanz des Dienstes gesucht (1), die anschließend für die Verwendung initialisiert wird (2). Nachdem die eigentliche Funktionalität des Dienstes gestartet ist (3), können zu einem späteren Zeitpunkt die Ergebnisse abgeholt werden (4). Dem Roboterprogramm ist dabei kaum anzusehen, dass es auch ausgelagerte, cloudbasierte Funktionen enthält. Von den Projektpartnern Kuka und Fraunhofer IPK wurde im Forschungsprojekt hierzu eine lauffähige Demonstrationsanlage entwickelt, um eine Pick&Place-Positionierungsaufgabe zu lösen. Werkstücke werden auf einem Fließband zum Roboter transportiert und sind zu palettieren. Die Erkennung von Position und Lage der Werkstücke sowie die Berechnung der Ablageposition werden von zwei Mehrwertdiensten durchgeführt. Durch diesen Ansatz können die bei nicht uniformen Teilen komplexen und aufwendigen Aufgaben der Objekterkennung und der Bestimmung der bestmöglichen Ablageposition in die Cloud-Infrastruktur ausgelagert werden. Der Aufbau ist beispielhaft für ein verteiltes System, da phasenweise beide Mehrwertdienste sowie die Bewegungssteuerung des Roboters parallel aktiv sind.

Ausblick: Der Roboter als Dienst
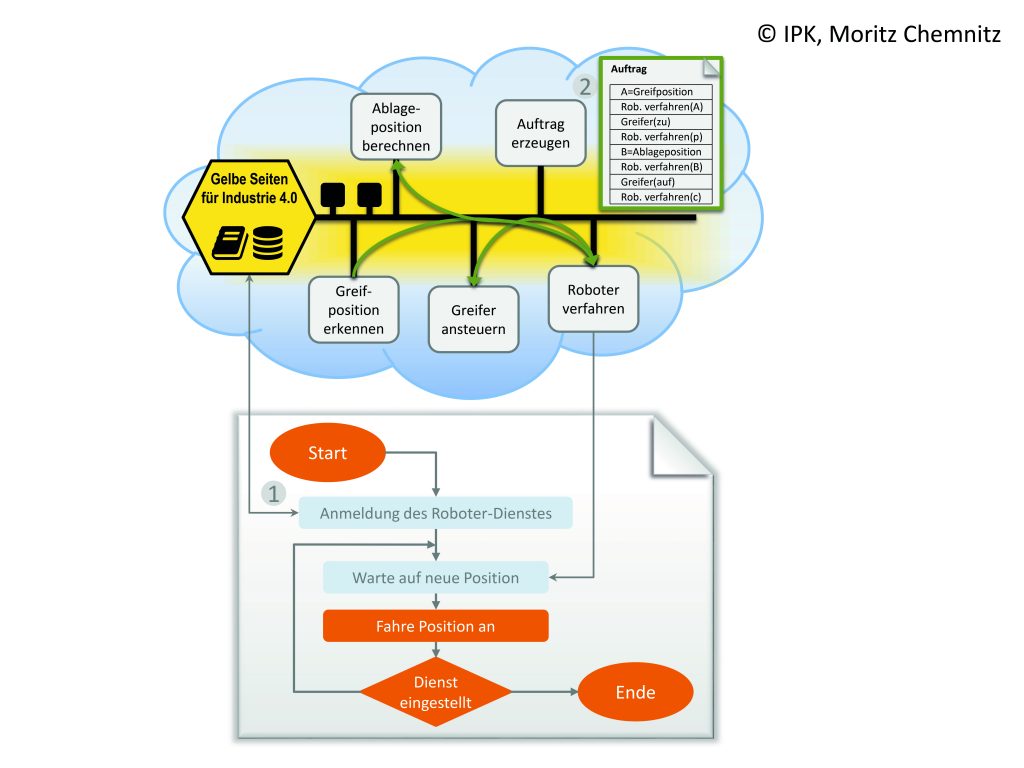
Im oben beschriebenen Szenario befindet sich die Logik des Ablaufs in der Robotersteuerung. Eine Alternative für dasselbe Szenario wurde vom Fraunhofer IPK entwickelt und ist in Bild 3 dargestellt. Alle Komponenten sind hierbei als Cyber-Physische Systeme (CPS) ausgelegt, die in GESI verwaltet werden. Der Roboter wird wie das Transportband, der Greifer oder die Objekterkennung als ein Dienst angesprochen, der bestimmte Funktionen bereitstellt. Die Logik zur Verkettung der Systeme kann so in die Cloud verlagert werden. Die Reihenfolge, in der die Dienste aufgerufen werden müssen, wird mit Hilfe von Aufträgen in Form von Listen oder komplexen Graphen von Dienst zu Dienst weitergereicht. Hierdurch ist die Konfiguration des gesamten Ablaufes, also beispielsweise einer Zelle oder Linie, auftragsindividuell veränderbar und hochflexibel.
Mehrwertdienste in Holzbearbeitungsmaschinen
Die CNC-Holzbearbeitungszentren der Firma Homag sind bereits heute so ausgerichtet, dass sie den Anwendern größtmögliche Flexibilität in der Nutzung erlauben. Um diese Flexibilität zu erreichen, besteht ein Ansatz darin, dass bei der Programmierung lediglich das Werkstück über seine Geometrie und die erforderlichen technischen Features beschrieben wird. Erst unmittelbar vor der Ausführung wird diese Beschreibung – in Abhängigkeit von der aktuellen Maschinenkonfiguration und -bestückung – durch einen Postprozessor auf der Maschinensteuerung in ein ausführbares NC-Programm übersetzt. Um umfangreiche Bahnplanungsalgorithmen bei reduzierten Berechnungszeiten zu ermöglichen, wurde dieser Postprozessor als Mehrwertdienst in der Cloud realisiert. Über die Gelben Seiten ermittelt die Maschine den Mehrwertdienstserver (siehe Bild 4). Anschließend kann die Maschine den Postprozessor starten (2) und das entsprechende NC-Programm (3) erhalten. Ein Steuerungsfeature, das heute bereits standardmäßig bei vielen Maschinensteuerungen eingesetzt wird, ist eine Kollisionskontrolle zur Überprüfung fehlerhafter NC-Programme. Aufgrund der begrenzten Rechenleistung heutiger Steuerungsrechner basiert diese Kollisionskontrolle auf stark vereinfachten 3D-Modellen der Maschine und des Rohteils. Entsprechend muss zur Vermeidung einer Kollision ein relativ großer Sicherheitsabstand programmiert werden. Die Verlagerung der Kollisionskontrolle als Mehrwertdienst in die Cloud erlaubt aufgrund der höheren zur Verfügung stehenden Rechenleistung eine deutlich detailliertere Modellierung der Maschinen- und Werkstückgeometrie bei der auch der fortschrittsbezogene Materialabtrag berücksichtigt werden kann. Durch diesen Mehrwertdienst sind Anwender in der Lage, ihre NC-Programme weiter zu verbessern und trotzdem eine hohe Sicherheit für eine störungsfreie Programmausführung zu gewährleisten. Weiterhin kann die Maschine selbst als Dienst (CPS) in den Gelben Seiten auftreten und Daten bereitstellen. Ein Beispiel hierzu sind Sensorsignale der Spindel, die an der Maschine erfasst und Auswertungsdiensten zur Verfügung stehen. Visualisierungs- und Condition-Monitoring-Dienst können so geräteübergreifend entwickelt und genutzt werden. Eine beispielhafte Umsetzung wird vom Fraunhofer IPK in Kooperation mit Homag im Rahmen des Projektes entwickelt.
Ausblick in die Umsetzung
Die beiden Mehrwertdienste NC-Programmgenerierung und Kollisionskontrolle sind im Rahmen des Projekts Picasso exemplarisch umgesetzt und über die Gelben Seiten nutzbar. Im Rahmen der weiteren Evaluierung werden die Nutzenpotenziale sowie die Risiken dieses Ansatzes untersucht und weitere mögliche Mehrwertdienste identifiziert. Das beschriebene Szenario der Robotik wird als Demonstrationsanlage in Kombination mit einer cloudbasierten Robotersteuerung auf den Stuttgarter Innovationstagen vorgestellt. Die CPS-Instanzen laufen in diesem Fall am IWF der TU Berlin, die Cloud-Steuerung auf Institutsrechnern des ISW der Universität Stuttgart, die reale Roboteranlage ist im Entwicklungslabor von Kuka Industries in Obernburg am Main installiert. Das Konzept der Mehrwertdienste und Teilnehmerverwaltung mit GESI lässt sich auf sämtliche Automatisierungsschritte im Produktionsumfeld anwenden. Von der Sensordatenerfassung für Kameras oder Kraftsensoren über die Bahnplanung für Roboter und Werkzeugmaschinen bis hin zu echtzeitkritischen Regelkreisen für sichere Mensch/Roboter Interaktion werden an der TU Berlin unterschiedliche Funktionen modularisiert, als Cloud-Dienste bereitgestellt und die Leistungsfähigkeit des Gesamtsystems untersucht und bewertet. Beispielsweise kann so eine CPS-fähige Kamerabox mit Anbindung an GESI sowohl für oben genannten Greifpunkt-Erkennungsdienst als auch für die am Fachgebiet IAT der TU Berlin entwickelte räumliche Roboterprogrammierung mit Augmented Reality verwendet werden.








