Funktionen zur sicheren Antriebsüberwachung sind mittlerweile Standard bei Antrieben, aber auch IO-Slaves mit vorgelagerter Safety-Funktion werden immer häufiger eingesetzt. Trotz aller Bemühungen zur Standardisierung, stellt dennoch die Bandbreite unterschiedlicher Feldbusprofile und auch Parameter eine erhebliche Anforderung an den Ersteller von Safety-Applikationen dar. „Gerade was die Transparenz der applikativen Sicherheitsfunktion, deren Parametrierung und Validierung bieten die marktgängigen Lösungen wenig Unterstützung. Genau dies haben wir uns zur Aufgabe gesetzt verbunden mit einer maximalen Konnektivität sowohl zur funktionalen Ebene als auch für den Safe-Daten-Austausch zwischen Maschinenzellen“ erklärt Gerhard Bauer, Geschäftsführer bei BBH Products. Die Lösung besteht aus der Programmieroberfläche SafePLC2 in Verbindung mit der SCU-Baureihe. Sie basiert auf der FUP-orientierten Programmierung mit Logikelementen und lässt sich ohne tiefergehende Kenntnisse individuell an die eigenen Anforderungen anpassen. Die lösungsorientierte und nutzerfreundliche Menüführung gewährt bei allen Aufgaben eine große Übersichtlichkeit – von der Implementierung und Konfigurierung einzelner Parameter von Sicherheitssteuerungen und Achsen bis hin zur anlagenübergreifenden Vernetzung einer Vielzahl von Master- und Slave-Geräten auch an übergeordnete Steuerungssysteme.
Funktionsbibliotheken integriert
Bei der Entwicklung war außerdem wichtig, dass sich die Sicherheitssteuerung an der betrieblichen Praxis orientiert. Aus diesem Grund integrierte der Anbieter eine Funktionsbibliothek in die Programmieroberfläche. Darin ist eine Vielzahl von vorkonfigurierten Funktionen enthalten, die oftmals bei der Parametrierung von Sicherheitssteuerungen verwendet werden und einfach per Drag&Drop-Funktion übernommen werden können. Hierzu zählen Funktionsbibliotheken für Sensoren, Aktuatoren und Überwachungsfunktionen bis hin zu komplexen Floating-Point FUP-Mathematik-Bausteine sowie laufend aktualisierte Libraries zur Integration von Slaves mit komplexen Safe-Funktionen. Das heißt das meist individuelle Safe-Profil von Antriebsumrichtern mit integrierte Überwachungsfunktionen wird im Funktionsplan als Block mit Eingängen zur Aktivierung dieser Funktionen und Ausgängen zur Weiterverarbeitung ihrer Stati dargestellt. Gleichzeitig wird mit einem Klick auf diesen Block das Parameterfeld dieser Funktionen geöffnet. Die Safe-Parameter der im Antrieb integrierten Funktionen können so direkt und übersichtlich im Funktionsplan bearbeitet und automatisch mit jedem Start in den Umrichter übertragen werden. Der SCU-FSoE-Master unterstützt hierbei sowohl das SRA-Verfahren, mit Tunneling der Parameter über den EtherCAT-Master, als auch die direkte Übertragung von bis zu 128Byte Safe Parameter per Slave. Neben Binärdaten kann jeder Slave auch analoge Daten wie Safe Speed und/oder Safe Position liefern. Diese sind in der SCU-Unit für achsbezogene oder mehrachs-kinematische Überwachungsfunktionen bestimmt. Komplexe bzw. sich wiederholende Funktionen können weiter objektorientiert, mit definierten Schnittstellen und Parametern, in Funktionsblöcke zusammengefasst und in einer kundenspezifischen Bibliothek abgelegt werden. Diese lassen sie sich mit einem Passwort schützen, sodass nur autorisierte Personen Zugang erhalten und den Inhalt einsehen und verändern können. Der Aufbau und Schutz von firmeneigenem Safety-Software-Know How wird so möglich.

Bild: BBH Products GmbH 
Bild: BBH Products GmbH

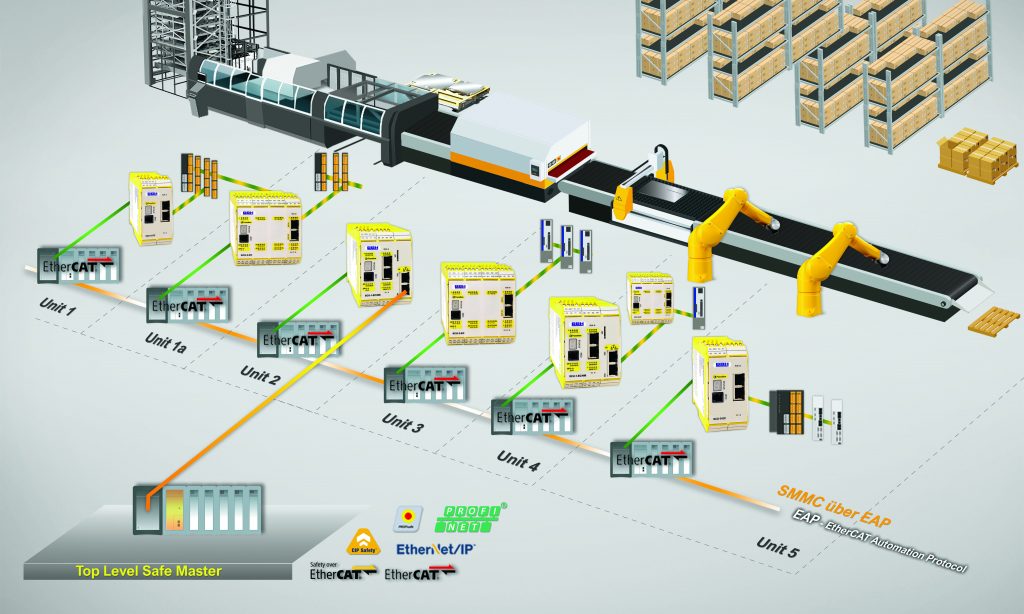
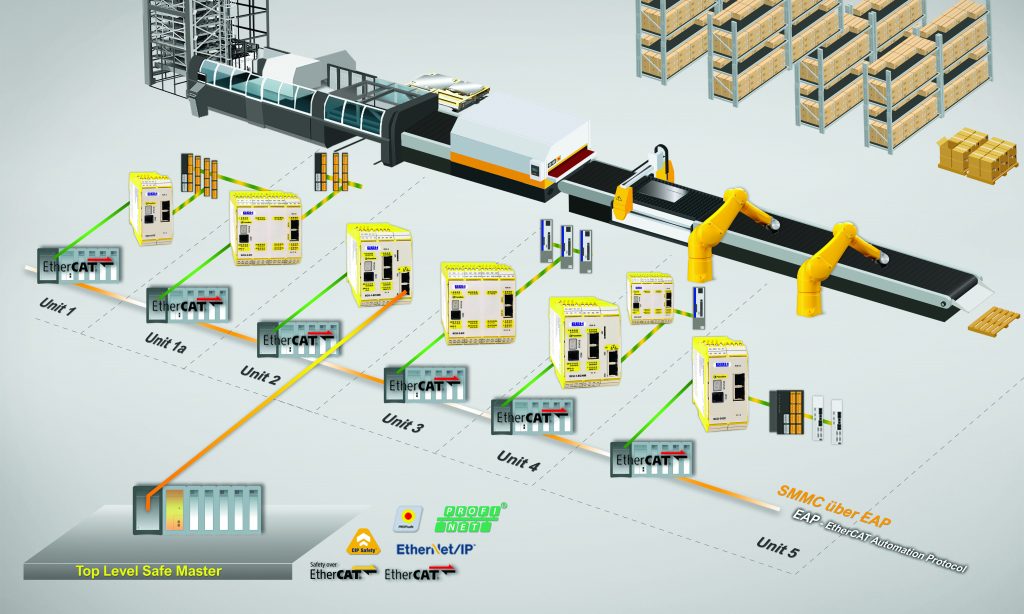
Einfache Validierung
Auch die im Safety-Bereich obligatorische Validierung wird durch einen automatisch generierten Report, der die programmierte Logik, die verwenden Safety-Funktionen und -Parametern enthält, Online-Diagnosen der Logik und Scope-Funktionen sowie auch einem Simulator-Modul optimal unterstützt. „Industrie 4.0 im Bereich Safety heißt vor allem maschinenübergreifender Austausch von sicheren Daten und Zugriff auf die Betriebsdaten sowohl der Safety-Steuerung als auch der nachgeordneten Safety-Sensoren. Genau hierauf haben wir bei der Entwicklung unserer SCU-Baureihe größten Wert gelegt“, so die weitere Ausführung von Hr. Bauer. Umgesetzt wurde dies mit der Möglichkeit sowohl des sicheren Datenaustausch innerhalb einer EtherCAT-Zelle in Master-Slave Struktur, das heißt ein FSoE Master ist zugleich Slave an einem weiteren, als auch zwischen Zellen durch Tunneling über EtherCAT-EAP. Größe und Typ der Daten können dabei nahezu frei definiert werden. Auch für Top-Down Strukturen mit Übergang in andere Feldbussysteme wird eine Lösung in Form einer Erweiterungsschnittstelle geboten. An diesem Interface lassen sich alle gängigen Feldbusprotokolle per Parameter einstellen und sichere Daten mit der übergeordneten Ebene mittels z.B. Profisafe, FSoE oder CIP-Safety austauschen. Der SCU-FSoE-Master fungiert hierbei als Gateway und bildet einen Safe-Slave in der übergeordneten Steuerung. Über das gleiche Interface ist auch ein Zugang zum integrierten OPC UA Server möglich und damit der Zugriff auf Betriebsdaten der Steuerung, aber auch von hieran angeschlossenen intelligenten Sensoren, z.B. mit SD-Businterface der Firma Schmersal. Die Baureihe SCU besteht aus FSoE-Master Baugruppen mit bis zu 40 integrierten IO und optionalem Kommunikationsinterface. Abgerundet wird die Baureihe durch spezielle IO-Slavebaugruppen mit denen in diese Baugruppe als auch von Encoder-Interfaces für bis zu 6 analogen oder digitalen Encoder. Die IO-Salve-Baugruppen bieten neben der transparenten Weiterleitung der Eingangs- und Ausgangsdaten die Möglichkeit einer Auslagerung von Funktionen, also der dezentralen Vorverarbeitung. Die Encoder-Interface-Baugruppen erfassen zum einen die sicheren Daten und zum anderen die funktionalen Daten und stellen diese in schnellen Zyklus von bis zu 62,5 µs der funktionalen Steuerung zur Verfügung. Die FSoE-Master- und Slave-Geräte sind geeignet bis PL e nach EN ISO13849-1 bzw. SIL3 nach IEC61508 und erfüllen dadurch höchste Sicherheitsanforderungen.