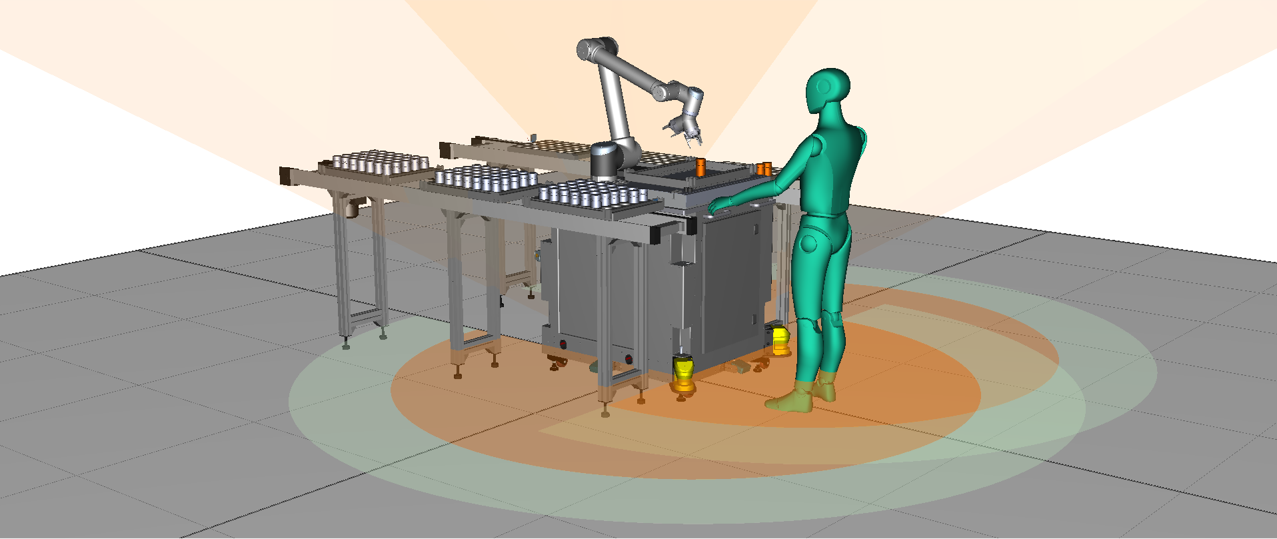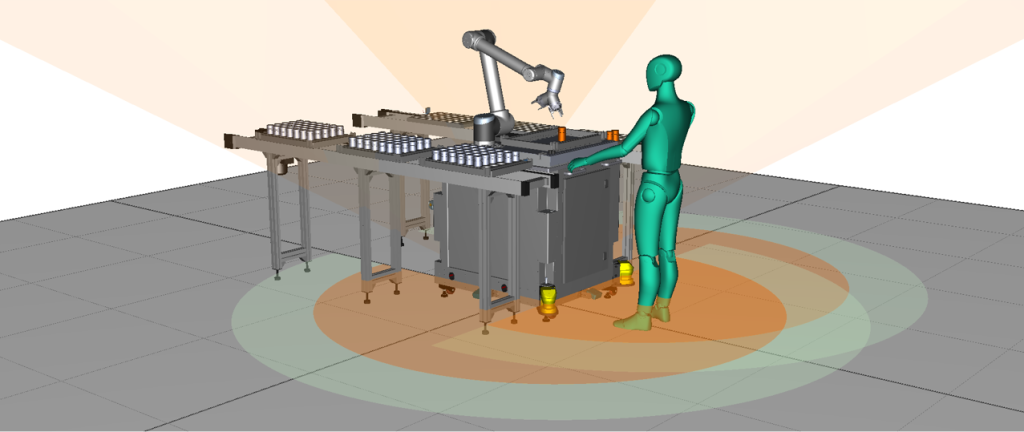
In dem Forschungsprojekt CoboTwin des Fraunhofer IWU und Coboworx geht es um die Sicherheitsabnahme für Roboteranwendungen. Ziel des Projekts ist es, die Sicherheitstests schon im Vorfeld schnell und effizient, aber sicher im Rahmen der virtuellen Inbetriebnahme (VIBN) am digitalen Zwilling durchzuführen. Alle Bewegungsabläufe werden durch den digitalen Zwilling abgebildet und können so bewertet werden. Für eine Sicherheitsprüfung ist zusätzlich auch das detaillierte Bewegungsverhalten des Roboters entscheidend. Daher wurde ein erweitertes VIBN-Modell eines Cobots mit besonders hoher Detailtiefe entwickelt. Zusätzliche Algorithmen wurden implementiert, um das Bewegungsverhalten in der ausreichenden Genauigkeit abzubilden.