In der Fördertechnik lösen fahrerlose Transportsysteme (FTS) immer öfter die bisher üblichen starren Installationen ab. Sie nehmen dem Menschen nicht nur eintönige und beschwerliche Prozessschritte ab, sondern lassen sich auch leichter an veränderte Anforderungen, Abläufe und Transportwege anpassen. So liefern sie auf den Gebieten Werkstücktransport, Montageliniengestaltung und Intralogistik die Grundlage für adaptive, also selbstoptimierende Produktionsprozesse. In den meisten Anwendungen erledigen die fahrerlosen Transportfahrzeuge die Navigationsaufgaben an Bord. Sie arbeiten dabei Transportaufträge ab, die sie von einer übergeordneten Steuerung erhalten.
Marktlücke unabhängiges FTS-Leitsystem
„Die Systeme der etablierten Hersteller sind oft proprietär und abgeschlossen“, betont Alexander Melkus, Geschäftsführer beim Salzburger Automatisierungsanbieter Sigmatek, und ergänzt: „In jüngster Zeit hinzugekommene vollautonome Fahrzeuge eignen sich noch weniger für die Integration. Sie sind eher für den Werkstattbetrieb geeignet als für die Verwendung als Teil der Gesamtautomatisierung eines Industriebetriebes.“
Diese Problemstellungen und die daraus resultierenden Integrationshürden sind in der Fachwelt bekannt. Sie haben zu Normierungsbestrebungen geführt. Deren erstes Ergebnis ist die VDA5050, eine vom Verband der Automobilindustrie (VDA) und dem Fachverband Fördertechnik und Intralogistik im Verband Deutscher Maschinen- und Anlagenbau (VDMA) gemeinsam definierte standardisierte Schnittstelle für die Kommunikation zwischen FTS und Leitsteuerung. Sie ermöglicht erstmals Lösungen von verschiedenen Herstellern in eine Leitsteuerung zu integrieren.
Sigmatek hat bereits seit Jahren das Ohr am FTS-Markt. Immerhin arbeiten Automatisierungssysteme des Herstellers als Bordrechner in den Fahrzeugen einer guten Handvoll europäischer FTS-Hersteller. „Wir haben erkannt, dass ein fahrzeughersteller-unabhängiges Flottenmanagementsystem in diesem Umfeld eine Marktlücke darstellt und beschlossen, diese zu füllen“, erläutert Melkus.
Zwischen ERP-System und Fahrzeug
Der Name des neuen Leitsystems lautet TCS, was für Traffic Control System steht. Als solches arbeitet die Software als Zwischenebene zwischen den Fahrzeugen selbst und Warenwirtschafts- und Lagerverwaltungssystemen. Aus diesen bezieht TCS die jeweiligen Transportaufträge.
Wie eine Taxizentrale schickt das Leitsystem ein verfügbares Fahrzeug zum Aufnahmeort und anschließend zur Lieferadresse. Das System erhält die Fahraufträge für die einzelnen Fahrzeuge und kümmert sich um die Routenplanung. Ist kein Warenwirtschaftssystem vorgelagert, können Fahraufträge auch direkt im TCS erstellt werden. Der Ablauf so eines Fahrauftrags ist frei-programmierbar. Das System berücksichtigt Besonderheiten der möglichen Wege, etwa Einbahnen, permanente oder temporäre Hindernisse sowie benutzerdefinierbare Einschränkungen.
Anpassung an die Realität
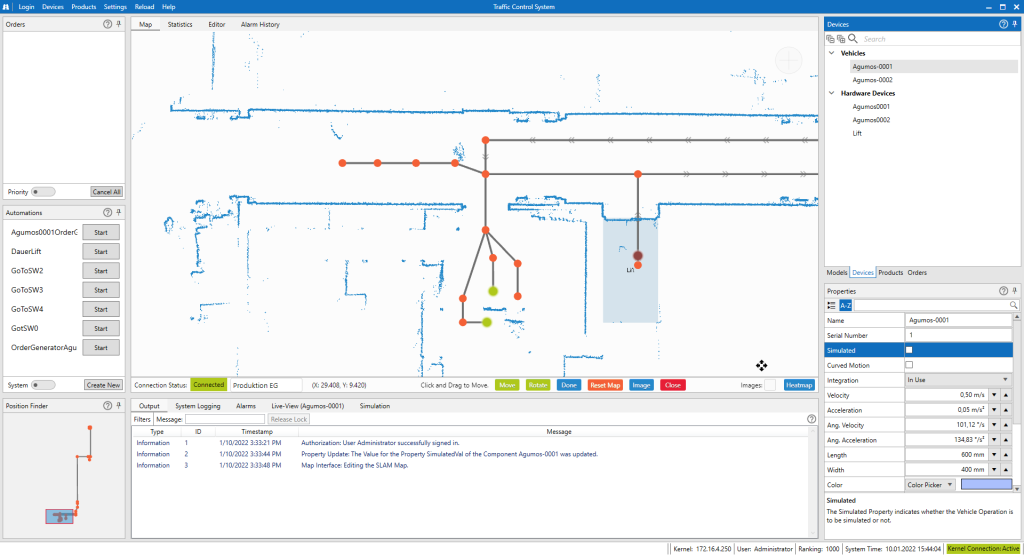
Nur in den seltensten Fällen stimmt bei der Erstellung der Hallenpläne die Theorie mit der Realität überein. Deshalb bietet das Traffic Control System die Möglichkeit, Echtdaten zu importieren, um die Landkarte an die tatsächlichen Gegebenheiten anzupassen. Sie können z. B. von fahrerlosen Transportfahrzeugen im Zuge der Navigation mit dem konturgeführten SLAM-Verfahren aufgenommen werden.
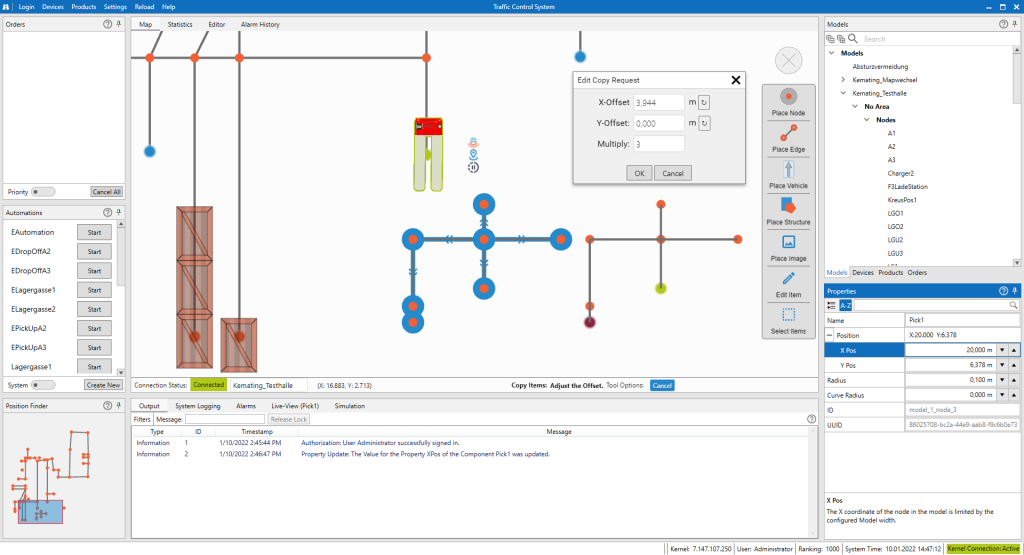
Für die Erstellung der Routenplanungs-Applikation steht Planern in TCS eine grafische Oberfläche zur Verfügung. Wichtige Funktionen dieser GUI, wie beispielsweise der Landkarteneditor, sind web-basierend und können so auch mit mobilen Endgeräten für einen schnellen Zugriff unterwegs genutzt werden. In diesem grafischen Editor lassen sich auch die einzelnen Fahrzeugtypen und Transportbehälter anlegen und beliebig instanziieren. Das kann auf Basis importierter Unterlagen ihrer Hersteller passieren, aber auch in Form generischer Definitionen. Dabei wird auch das Verhalten der einzelnen Fahrzeuge an den einzelnen Stationen spezifiziert.
Dynamisch reagieren
„Das wichtigste Unterscheidungsmerkmal zwischen guten und weniger guten FTS-Leitsystemen ist ihre Fähigkeit zur effizienten und dynamischen Verkehrsplanung“, unterstreicht Sigmatek-Applikationsingenieur Gerhard Veldman, der federführend an der Entwicklung von TCS mitwirkte. „Es geht um eine effiziente Auftragsabarbeitung mit geringster Streckenbelegung.“ Dabei müssen Vorfahrtsregeln (z.B. begehbare Routenstücke oder aufnehmbare Ladungen) und die Ladezustände der Fahrzeug-Akkus beachtet werden. Dynamisch reagieren zu können, ist ein wichtiger Teil der Routenplanung. Wenn z.B. ein Hindernis gemeldet wird, oder die Landkarte angepasst wird, reagiert das TCS sofort und sucht die bestmögliche Route für alle Fahrzeuge unter Berücksichtigung der neuen Bedingungen.
Das Sigmatek-System bietet die Möglichkeit, Hindernissen auszuweichen. Dazu kann das System Hindernisse umfahren oder auf Alternativrouten ausweichen. Wenn ein Fahrzeug die Route verlassen soll, berücksichtigt das System sogar die Breite der Ladung. Aufgrund verschiedener Sicherheitsaspekte müssen Bereiche, über welche die Fahrzeuge ausweichen dürfen, explizit definiert werden. Das erfolgt anwenderfreundlich mit dem grafischen Landkarten-Editor.
Einfach integrieren
Zur Konfiguration eines FTS-Leitsystems gehört auch die Integration externer Geräte. Einfachere Dinge wie z. B. Ampeln oder Schranken lassen sich schnell und komfortabel hinzufügen und konfigurieren. Für die Integration komplexerer Knotentypen wie Rolltore oder Aufzüge finden sich vorbereitete Schnittstellenroutinen in der Programmbibliothek. Die physikalische Hardwareanbindung für umgebende Steuerungs- oder Automatisierungssysteme sowie ERP- oder Lagerverwaltungssysteme erfolgt per MQTT-Schnittstelle oder über ein REST API.
Für die Integration in die Sigmatek-Softwaresuite Lasal bietet TCS eine eigene Library, die das Hardware-Mapping besonders einfach macht. Nutzer anderer Systeme mappen die Signalbezeichnungen aus TCS anhand der mitgelieferten Schnittstellendokumentation im jeweiligen Engineering-System auf die verwendete Hardware. Per Mapping erfolgt auch die WLAN-Integration mit Zuweisung der Kommunikationsart je nach Typ der verwendeten Fahrzeuge. Manche Hersteller nutzen dafür z. B. UDP-Protokolle, die VDA5050 spezifiziert MQTT.
Simulation und Analyse
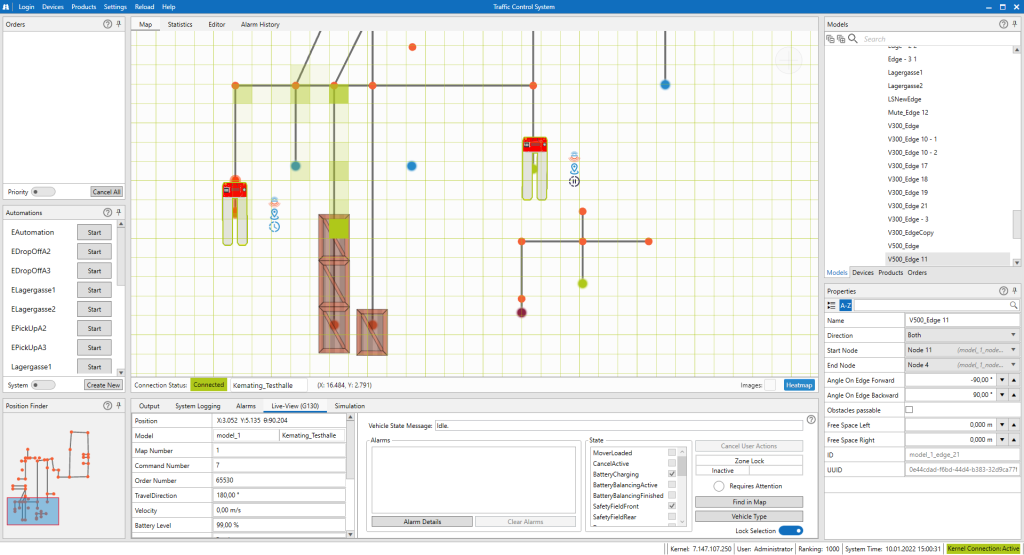
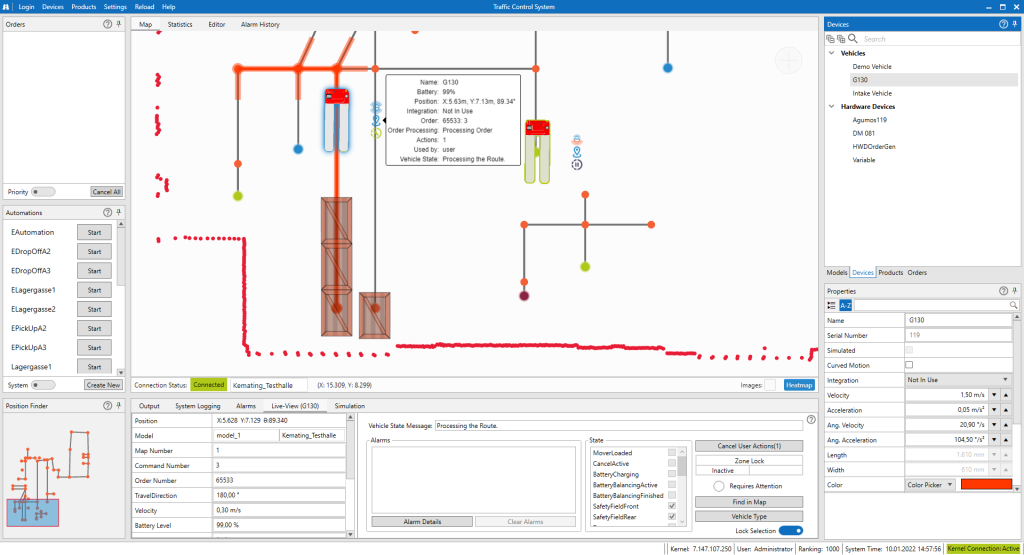
Wichtig ist bei all dem die Möglichkeit, die Abläufe vorab zu simulieren. In TCS erfolgt diese Simulation bis zu 720-mal schneller als der reale Ablauf; so kann ein ganzer Tag in zwei Minuten vollständig abgebildet werden. Sicherheit gibt auch die Visualisierung im laufenden Betrieb. Dabei erfolgt permanent eine vollständige Echtzeitdarstellung der Fahrzeugbewegungen mit sämtlichen Statusinformationen. Ort, Bewegungsrichtung und -geschwindigkeit sowie Batterie-Ladestände der einzelnen Fahrzeuge werden in der 2D-Landkarte dargestellt. Dem Plan überlagerte Heatmaps lassen Rückschlüsse auf Stauungen und andere Verkehrszustände zu. Ein Analysemodul meldet unmittelbar alle auftretenden Fehler und Alarme und ermöglicht die Untersuchung der Fehlerursachen.
„Mit TCS bieten wir ein umfassendes FTS-Flottenmanagementsystem an, das sich ganz ohne Bezug zu Sigmatek-Systemen nutzen lässt“, resümiert Geschäftsführer Melkus. So wie die komplette Integration eines Sechsachs-Roboters in die Steuerung einer Werkzeugmaschine könne auch die Integration eines FTS in die Gesamtautomatisierung einer Produktionslinie sehr viel Sinn ergeben. „Durch TCS ist diese mit geringem Aufwand möglich“, ergänzt Veldman.