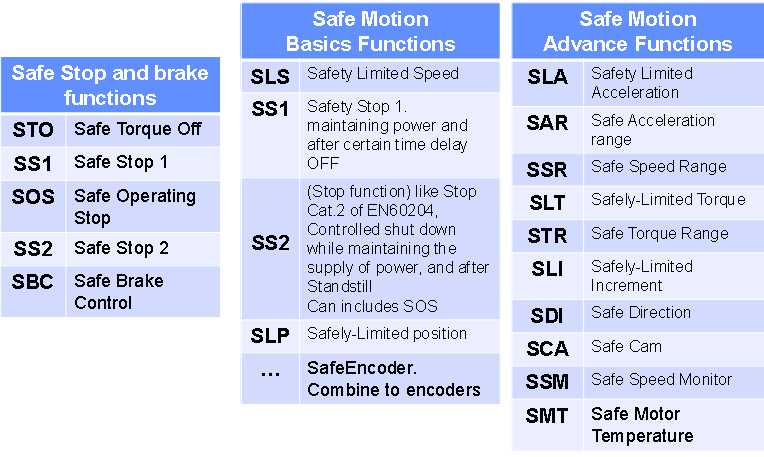
Die Einführung von Safety-bewährten Netzwerken macht die Steuerung von Antrieben und Motion immer mehr zu einer Softwareangelegenheit: Fest verdrahtete Systeme werden durch Softwarebefehle über Netzwerke ersetzt. Diese Entwicklung wird von Initiativen wie Industrie 4.0 getrieben, um mehr Flexibilität bei bevorzugt gleichem Qualitäts- und Preislevel zu schaffen. Allerdings kommen unterschiedliche Netzwerke mit unterschiedlichen Lösungen daher, was zu Problemen bei den Anwendern führt, besonders in Produktionsumgebungen mit heterogenen Netzwerken. Um die unterschiedlichen Lösungen in Einklang zu bringen hat PLCopen eine Arbeitsgruppe zum Thema Safe Motion gestartet, die eine generische Vorlage erstellt hat, um Motion-Control-Safety-Aspekte über verschiedene Netzwerke wie Profisafe, Safety over Ethercat, CIP Safety over Sercos, OpenSafety, CC-Link IE und Mechatrolink sowie Empfehlungen von Anwenderorganisationen wie OMAC zu lösen. Außerdem gibt es viele Befehle, die mit Safe Motion einhergehen, und es macht keinen Sinn, jeweils einen Funktionsblock für jeden von ihnen zu erstellen, da die Funktionalität meistens dieselbe ist. Die Lösung der PLCopen basiert auf der existierenden Funktionalität, wie sie bereits in PLCopen Safety spezifiziert ist: SF_SafetyRequest. Damit können die meisten Safety-Drive-Funktionen einfach abgebildet werden, insbesondere durch das Bereitstellen eines Leitfadens mit definierten Namenskonventionen, der ein generisches Schema enthält, wie man Signale benennt, die in Verbindung mit den vom Safety Drive unterstützten Funktionen vorkommen. Kombiniert mit einem I/O- oder einem Antriebskonfigurator können diese Benennungen automatisch für die Bits im Antriebsstatus/Steuerwort generiert werden, passend zum Profil des Antriebes (symbolische Bezeichnung). Dieser Vorschlag basiert auf einer Architektur, in der die Safety-Funktionalitäten inklusive aller relavanten Parameter im Antrieb integriert sind. Die Arbeit ist eine Weiterführung der PLCopen-Motion- und PLCopen-Safety-Aktivitäten, die sich aus einer Folge von Spezifikationen ergeben haben. In den veröffentlichten Spezifikationen wurden die Safety-Aspekte um den Motion-Aspekt bisher nur partiell beschrieben. Dieses neue Dokument füllt diese Lücke.