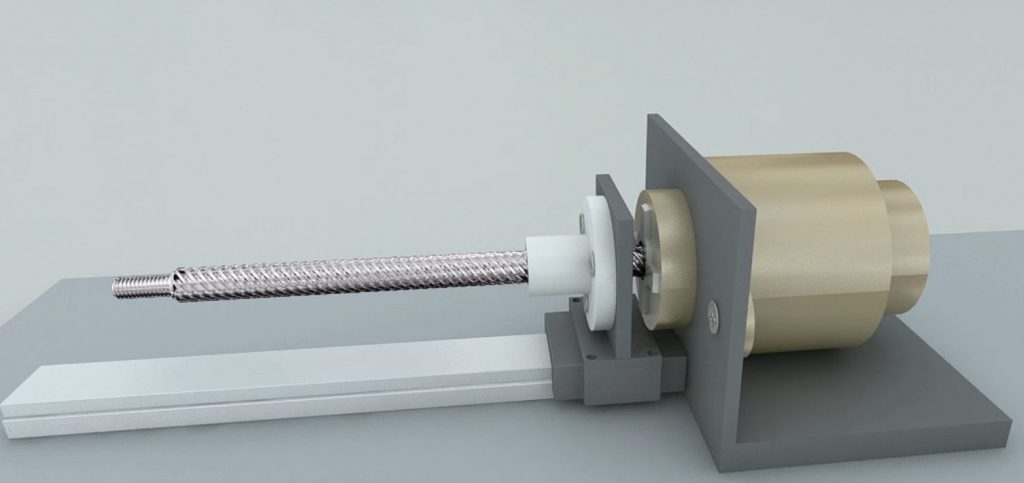
Vier unterschiedliche Bauweisen
Beide Versionen stehen in den Ausführungen External, Non-Captive und Captive C bzw. Captive K zur Verfügung. Bei der Ausführung External wird die Linearbewegung erreicht, indem die Mutter auf der als Motorwelle arbeitende Spindel gegen Verdrehen gesichert ist. In dem zu bewegenden Schlitten wird die Mutter befestigt und durch die Drehbewegung der Spindel linear bewegt. Der Schlitten muss hierbei kundenseitig geführt werden. Um eine lange Lebensdauer zu erzielen und die Reibkräfte zu reduzieren, ist es wichtig, die Führung zur Drehachse genau anzupassen. Der Anwender muss sich hier selbst um die Verdrehsicherung kümmern, indem er z.B. eine Führungsschiene anbringt. Bei längeren Spindeln muss das freie Spindelende eventuell noch gegengelagert werden. Bei der Non-Captive-Variante ist in der Hohlwelle des Motors die Mutter eingebracht. Ihre Drehung verursacht eine lineare Bewegung der Spindel. Wird hier die Spindel fixiert, bewegt sich der Motor hin und her. Ist der Motor fixiert, sitzt die Masse am Ende verdrehgesichert auf der Spindel. Die Captive-C-Ausführung (geschlossenes System) eignet sich für raue Umgebungsbedingungen. Hier entsteht die Linearbewegung durch die bereits intern verdrehgesicherte Schubstange. Die Schubstange hat ein Innengewinde und eine Verdrehsicherung und wird in einem speziell geformten Gehäuse geführt. Dreht sich der Rotor (Spindel), dann entsteht über dem Gewindetrieb eine Linearbewegung und die Schubstange fährt ein und aus. Da die Verdrehsicherung bereits integriert ist, hat der Kunde bei dieser Variante den geringsten konstruktiven Aufwand. Die Last wird am Ende der Schubstange fixiert. Die Captive-K-Version unterscheidet sich von der Captive C durch den Antrieb. Die Schubstange ist vorne genutet und damit verdrehgesichert geführt. Diese Ausführung bildet zusammen mit der Gewindespindel den Antrieb. Dreht sich der Rotor, fährt die Schubstange ein oder aus. Zu beachten ist hier, dass die Spindel auf der Rückseite in Abhängigkeit des Hubs ausfahren kann. Die jüngste Variante stellt wegen ihrer kleineren Bauform gegenüber der Captive-C-Variante in vielen Anwendungen eine gute Alternative dar.
Großes Anwendungspotenzial
„Die Linearaktuatoren finden überall dort Einsatz, wo eine lineare Positionierung stattfindet“, sagt Kämmerling. Generell unterscheiden sich die Anwendungen nicht aufgrund der eingesetzten Bauart der Aktuatoren. Ihre Auswahl hängt vielmehr von der Philosophie der Kunden, den Gegebenheiten im Unternehmen oder von Faktoren wie Preis bzw. zur Verfügung stehender Bauraum ab. Für die Fabrik der Zukunft bzw. Industrie-4.0-Anwendungen stehen die MDrive und Lexium MDrive-Antriebe mit den bekannten Schnittstellen RS485/Modbus, CANopen, Ethernet und Profinet zur Verfügung. Oder sie lassen sich über die KannMotion-Steuerung mit einer RS485 oder einem Ablaufprogramm I/O Steuerung komplettieren.